Dead Spiders as Grippers for Micro-Assembly Tasks
Dead Spiders as Grippers for Micro-Assembly Tasks
Engineers are taking advantage of natural phenomena with "necrobotics," a new field that hopes to respectfully and sustainably source and utilize biotic materials for robotics applications.
Daniel J. Preston, an assistant professor of mechanical engineering at Rice University, has found a way to use dead spiders as gripping tools for delicate procedures, such as the assembly of electronic components.
His research group focuses on soft robotic systems that often use nontraditional materials like hydrogels, elastomers, and textiles that are softer than hard plastics and metals.
"We use all kinds of interesting new materials that can be actuated by things like chemical reactions, pneumatics, and light," said Preston.
The “aha” moment occurred when Preston and his team were setting up their lab and noticed a curled-up spider at the edge of a hallway. "We were really curious as to why spiders curl up after they die,” said Faye Yap, graduate student and group member.
More Like This Article: Cinema-Inspired Simulation Spawns Soft Robots
Some quick research showed that spiders only have flexor muscles to contract their legs inward and rely on hydraulic pressure to extend their legs outward. When they die, they lose the ability to actively pressurize their bodies and therefore curl up.
"It then occurred to us that deceased spiders have the perfect architecture for small-scale, naturally derived grippers and we wanted to find a way to leverage this mechanism," Preston said.
Defining Necrobotics
Manipulating the dead spider's physiology was the first step in defining a new field of research Preston calls “necrobotics.”
Spiders use hydraulics to move their bodies. A chamber near their head contracts to send blood to limbs, forcing them to extend. When the pressure is relieved, the legs contract.
Using a dead wolf spider, Yap penetrated the hydraulic chamber with a needle, which she then fastened in place with a drop or two of superglue. The other end of the needle was attached to a handheld syringe. When she pushed air through the needle and into the hydraulic chamber the legs extended almost instantly.
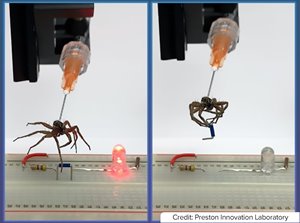 A gripper is used to lift a jumper and break a circuit on an electronic breadboard, turning off an LED. Credit: Preston Innovation Laboratory
A gripper is used to lift a jumper and break a circuit on an electronic breadboard, turning off an LED. Credit: Preston Innovation Laboratory
Test results showed a deceased wolf spider can lift more that 130% of its own body weight, and sometimes much more. The experiment also showed the spider grippers could manipulate a circuit board and move objects.
“We were surprised by the simplicity of the fabrication process and also the effectiveness of the necrobotic gripper at performing grasping tasks,” said Yap. “We were also encouraged by the fast actuation speed of the necrobotic gripper relative to some other soft grippers shown in prior work.”
Moving Forward
Preston’s team was able to leverage its understanding of hydraulics along with the actuation mechanisms of spiders and pneumatic soft robotics to develop an innovative solution that circumvents the tedious fabrication steps required for creating typical small-scale mechanical actuators.
“Right now we are working on demonstrating independent control of each individual leg, which we hope will allow us to study the locomotion and gait of arachnids,” said Preston. “We also plan on incorporating thin polymeric coating materials to prolong the gripper lifetime.”
You Might Also Like: Soft Computer Logic for Soft Robots
Researchers from disciplines across engineering and the natural sciences have reached out to discuss further development of this project. Possible applications include repetitive pick-and-place tasks for assembly operations in some industries, such as electronics.
"This area of soft robotics is a lot of fun because we get to use previously untapped types of actuation and materials," said Preston. "The spider falls into this line of inquiry. It's something that hasn't been used before but has a lot of potential. We hope that our work will inspire people to pursue their curiosity about natural phenomena that might often be taken for granted, and that this new field of “necrobotics” will spark ideas for how we can respectfully and sustainably source and utilize biotic materials for robotics applications.”
Mark Crawford is a science and technology writer in Corrales, N.M.
Engineers are taking advantage of natural phenomena with "necrobotics," a new field that hopes to respectfully and sustainably source and utilize biotic materials for robotics applications.

Writer and editor at MC2 Solutions
Related Content






