Robotic Crawler Inspects Concrete Structures
Robotic Crawler Inspects Concrete Structures
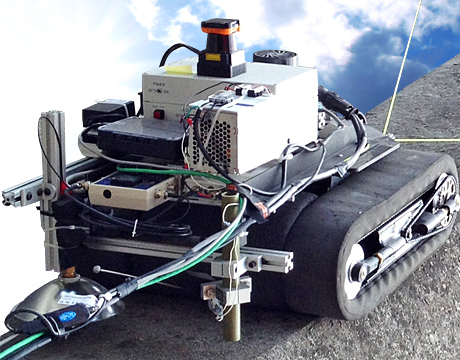
Robotic concrete crawler. Image: Electric Power Research Institute
Properly maintained concrete cooling, containment, and impoundment structures are essential for the long-term safety and operation of steam-electric power plants, hydropower facilities, and other industrial sites. However, many of these concrete structures are at least 40 years old and beginning to deteriorate. This includes critical structures such as cooling towers, nuclear containment buildings, reactor cavities, spent fuel pools, hydroelectric dams, and wind turbine foundations. Much of the degradation is caused by poor construction practices, but design deficiencies and outdated operational and maintenance practices also can damage the concrete.
Proper accessibility to the key areas of the structure is often challenging; manual inspections are also labor-intensive, costly, and sometimes dangerous. Conducting these tests is easier and less expensive with automated, robotic sensing devices, which also allow more frequent inspections. Although some of these devices are on the market today, their capabilities and accuracy tend to be limited.
To address these deficiencies, the Electric Power Research Institute (EPRI), Charlotte, NC, has developed a “robotic concrete crawler” for inspecting hard-to-reach concrete surfaces. The device is designed to:
- Reduce the challenges and costs of inspecting large concrete structures
- Improve worker safety
- Deliver more comprehensive data on concrete degradation and aging
- Support long-term operations of nuclear, renewable, and fossil generating assets.
Making the Grade
About the size of a lawnmower, the concrete crawler robot can climb the surfaces of large power industry structures and assess structural integrity, using on-board instrumentation and nondestructive evaluation technologies to measure concrete properties. It can negotiate concave, convex, or overhanging vertical structures, carrying a payload of equipment that weighs more than 40 pounds. A vacuum chamber generates more than 225 pounds of adhesive force and is surrounded by a rolling foam seal that guards against leakage and facilitates propulsion. The adhesion is so strong that it would require more than 50 pounds of force to dislodge the robot from a smooth concrete surface.
“The concrete crawler employs a commercially available robotic platform, which is flexible and can accommodate several different types of sensing systems, depending on the type of degradation that affects the structure,” says Maria Guimaraes, project manager for EPRI’s nuclear sector. Onboard systems include simultaneous localization and mapping (SLAM) technology and advanced non-destructive evaluation (NDE) instrumentation developed for concrete applications.
“The payload of advanced NDE instrumentation will provide unprecedented abilities to interrogate the interior of concrete structures and locate and characterize voids, rebar corrosion, and other internal defects,” continues Guimaraes. “Computer-encoded data and images will support real-time condition assessment and long-term monitoring of degradation and aging processes to guide maintenance decision-making and risk-informed management for nuclear, fossil, and hydro assets.”
Future Plans
In mid-July 2013, EPRI and the New York Power Authority (NYPA) conducted a test inspection of its hydroelectric power plant using the robotic concrete crawler. Deployment and data collection were successful, including analyses using thermography, air-coupled impact echo technology, electrical resistivity, and moisture measurements.
“We are committed to applying this research to help the power industry manage critical concrete infrastructure assets such as cooling towers and nuclear containment buildings,” says Guimaraes. “As concrete assets age, it becomes increasingly important to have a variety of monitoring inspection tools available to inform maintenance and repair decisions. The concrete crawler is one of many tools that could support such efforts.”
Future plans include developing an automated inspection and NDE system for mission-critical concrete structures, which Guimaraes hopes will be ready for commercial deployment by 2016 with application-specific guidance. “The goal then will be to perform inspections of large vertical concrete structures, which will be more cost-effective, safer, and less time-consuming than they are today,” she says.
Mark Crawford is an independent writer.
The concrete crawler employs a commercially available robotic platform, which is flexible and can accommodate several different types of sensing systems, depending on the type of degradation that affects the structure.Maria Guimaraes, project manager, EPRI's Nuclear Sector
Robotic concrete crawler. Image: Electric Power Research Institute

Writer and editor at MC2 Solutions
Related Content






