A Classic Toy Pops into Usefulness
A Classic Toy Pops into Usefulness
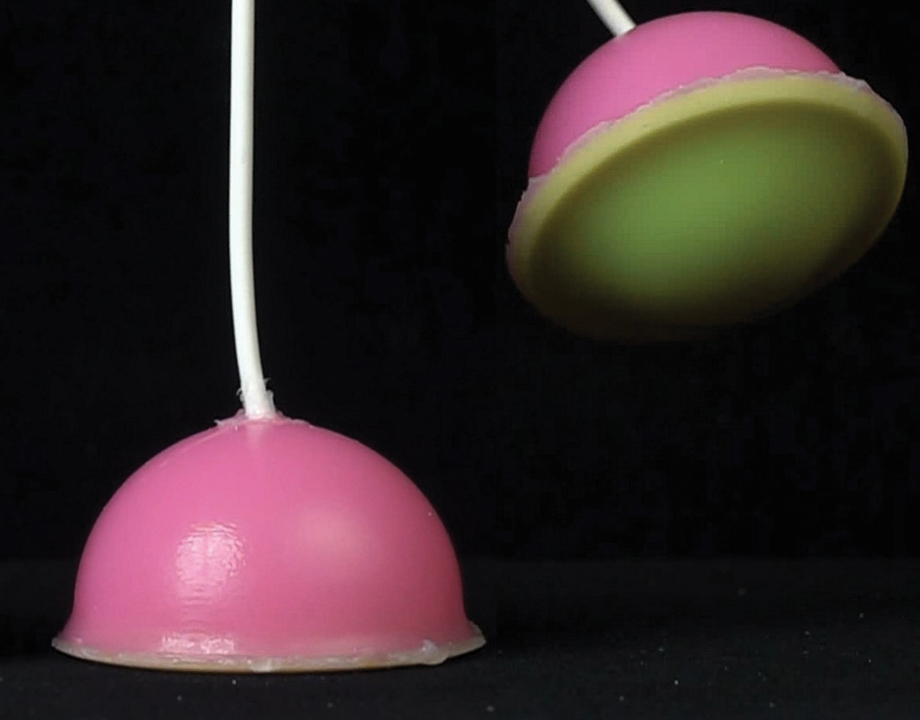
The popping actuator goes into action when inflated just the right amount. Photo: Harvard J.A. Paulson School of Engineering and Applied Sciences
The simplest toys can elicit a disproportionate sense of wonder. They can also dish up a sudden and surprising source of power. Take a half-a-racquetball-like piece of rubber brought home from a child’s birthday party: Invert it, give it a squeeze, and set it on the table, and within seconds it has righted itself and popped several feet into the air.
Now a group of Harvard engineers has found a way to use that mechanism to power a robot.
“If you look at the toy, it is in essence a monostable structure,” said Benjamin Gorissen, a postdoc in the university’s J.A. Paulson School of Engineering and Applied Sciences and the lead author of the paper the team published in Science Robotics. “Release it on a table and it will always go back to its original configuration.” But to have a controlled hopping, popping robot, Gorissen and his colleagues needed the cap to be bistable, to stay in its nearly popped state until triggered to go into action.
Editor’s Pick: High-Speed Chameleon Tongue Redefines Soft Robots
To do so they used an inflatable soft actuator, a kind of balloon made of two shells. Uninflated, the curves of two halves sit against each, one inside the other. When air is introduced, the top half blows up like a balloon while the bottom half expands until it inverts itself with a pop. “We can bring it to the very edge of jumping and keep it there,” Gorissen said. “It’s very stable. Then with just a very small input, it jumps. The Venus fly trap does the same thing. It lives in a state just before instability—it just needs the input of an ant to tickle its hairs and then it releases this energy.”
When Gorissen and his team looked into the literature to see what kind of work had previously been done on shell buckling they were surprised to find that the phenomena had been examined in depth. “There’s a massive amount of knowledge on how these things fail, but no one studied what we can do beyond failure.” Gorissen and his team analyzed the pressure volume curve of their inflatable and were to able to pinpoint the area where the energy release occurs.
That release can happen with any kind of rubbery material, but the stiffer the material, the more explosive and powerful the energy release. “Now you can tailor your actuators toward the application,” said Gorissen.
Recommended for You: Soft Computer Logic for Soft Robots
And those potential applications are surprisingly many. Surgical robots, for instance, do well to be soft and are by necessity slow, but it’ll have a tough time moving fast enough to puncture a vein, if such a procedure is necessary. “Now we have a way to create accelerations,” Gorissen said. A needle on one end of the balloon could be popped through a membrane in a safe and controlled way.
On the other end of the spectrum, if, in space, an inflatable needs to puncture another inflatable, it will need some form of sudden energy. Without it a needle attached to one would simply push away the other as they came together. Now one can can puncture the other with a sudden thrust.
Similarly, automatic grippers in manufacturing can be made faster with sudden accelerations but still remain soft—perfect for a tool that needs to pick up eggs.
“All domains that require acceleration now can also be made with softness,” Gorissen said. “It’s inspired by a toy but the applications are way beyond what you would think.”
Michael Abrams is a technology writer based in Westfield, N.J.
Now a group of Harvard engineers has found a way to use that mechanism to power a robot.
“If you look at the toy, it is in essence a monostable structure,” said Benjamin Gorissen, a postdoc in the university’s J.A. Paulson School of Engineering and Applied Sciences and the lead author of the paper the team published in Science Robotics. “Release it on a table and it will always go back to its original configuration.” But to have a controlled hopping, popping robot, Gorissen and his colleagues needed the cap to be bistable, to stay in its nearly popped state until triggered to go into action.
Editor’s Pick: High-Speed Chameleon Tongue Redefines Soft Robots
To do so they used an inflatable soft actuator, a kind of balloon made of two shells. Uninflated, the curves of two halves sit against each, one inside the other. When air is introduced, the top half blows up like a balloon while the bottom half expands until it inverts itself with a pop. “We can bring it to the very edge of jumping and keep it there,” Gorissen said. “It’s very stable. Then with just a very small input, it jumps. The Venus fly trap does the same thing. It lives in a state just before instability—it just needs the input of an ant to tickle its hairs and then it releases this energy.”
When Gorissen and his team looked into the literature to see what kind of work had previously been done on shell buckling they were surprised to find that the phenomena had been examined in depth. “There’s a massive amount of knowledge on how these things fail, but no one studied what we can do beyond failure.” Gorissen and his team analyzed the pressure volume curve of their inflatable and were to able to pinpoint the area where the energy release occurs.
That release can happen with any kind of rubbery material, but the stiffer the material, the more explosive and powerful the energy release. “Now you can tailor your actuators toward the application,” said Gorissen.
Recommended for You: Soft Computer Logic for Soft Robots
And those potential applications are surprisingly many. Surgical robots, for instance, do well to be soft and are by necessity slow, but it’ll have a tough time moving fast enough to puncture a vein, if such a procedure is necessary. “Now we have a way to create accelerations,” Gorissen said. A needle on one end of the balloon could be popped through a membrane in a safe and controlled way.
On the other end of the spectrum, if, in space, an inflatable needs to puncture another inflatable, it will need some form of sudden energy. Without it a needle attached to one would simply push away the other as they came together. Now one can can puncture the other with a sudden thrust.
Similarly, automatic grippers in manufacturing can be made faster with sudden accelerations but still remain soft—perfect for a tool that needs to pick up eggs.
“All domains that require acceleration now can also be made with softness,” Gorissen said. “It’s inspired by a toy but the applications are way beyond what you would think.”
Michael Abrams is a technology writer based in Westfield, N.J.
The popping actuator goes into action when inflated just the right amount. Photo: Harvard J.A. Paulson School of Engineering and Applied Sciences

Freelance writer based in New Jersey
Related Content

Jul 13, 2026
Exoskeleton Improves Mobility for Stroke Survivors

University of Utah researchers are piloting a 5.5-pound wearable robotic solution to help individuals with hemiparesis walk.

Jun 22, 2026
Blaze-Battling Bots Ahead

A novel system that uses AI-powered robots to extinguish fires could eliminate the need to put firefighters in dangerous situations.

May 21, 2026
Touchless Movement Through Fluidic Torque

Fluid-generated torque generated by microrobot swarms can move passive objects in surprising ways—without the need for physical contact.

May 19, 2026
Soft Robots Made Fast and Cheap

A new ultra-low-cost fabrication method makes soft robots faster and cheaper to build, opening the field to wider use in research and education.