Snail-Inspired Robot Sucks up Floating Microplastics
Snail-Inspired Robot Sucks up Floating Microplastics
Cornell research team developed a snail-inspired aquatic robot that could one day rid oceans and lakes of microplastics.
Bio-inspired engineering—taking lessons from nature and applying them to new technology—has accelerated and innovated designs that would not previously have been conceived if not for the natural world. Recognizing this, many institutions have invested in bio-inspired projects, including the College of Agricultural and Life Sciences (CALS) at Cornell University.
In their latest achievement, Cornell Professor and Director of Graduate Studies, Biological and Environmental Engineering, Sunghwan “Sunny” Jung and his team have developed an aquatic robot inspired by a snail that could one day rid oceans and lakes of microplastics.
Jung explains that bio-inspiration “for good” is how he and his team believe they can off-set the damaging impacts humans have had on the environment. “We overuse natural resources, and we waste a lot, especially plastics,” he said. “But we can learn a lot of things from biological systems to live in equilibrium with our environment and protect it.”
 Sunny Jung, professor of biological and environmental engineering (far right) and study coauthors (from left), Jisoo Yuk, Chris Roh and Yicong Fu, watch a demonstration of their snail-inspired robot.
Photo: Jason Koski/Cornell University
Using these principles of nature, the microplastics robot was inspired by a Hawaiian apple snail because of how it uses its small foot-like appendage called the ventral foot. “Snails are very slow creatures, so instead of chasing the food particles, they make this undulation to suck the fluid toward themselves and collect their food while floating on the surface,” explained Jung.
Sunny Jung, professor of biological and environmental engineering (far right) and study coauthors (from left), Jisoo Yuk, Chris Roh and Yicong Fu, watch a demonstration of their snail-inspired robot.
Photo: Jason Koski/Cornell University
Using these principles of nature, the microplastics robot was inspired by a Hawaiian apple snail because of how it uses its small foot-like appendage called the ventral foot. “Snails are very slow creatures, so instead of chasing the food particles, they make this undulation to suck the fluid toward themselves and collect their food while floating on the surface,” explained Jung.
Like snail’s food, many microplastics also tend to float on the surface of the water, and they are too small for current ocean-cleanup technologies to collect. Right now, popular mechanisms include large nets and conveyor-built systems that scoop up large debris like plastic bottles and containers. But microplastics remain and continue to break down into smaller and smaller pieces. These small particles are consumed by fish and other marine life at an alarming scale, blocking their digestive tracts and causing them to starve.
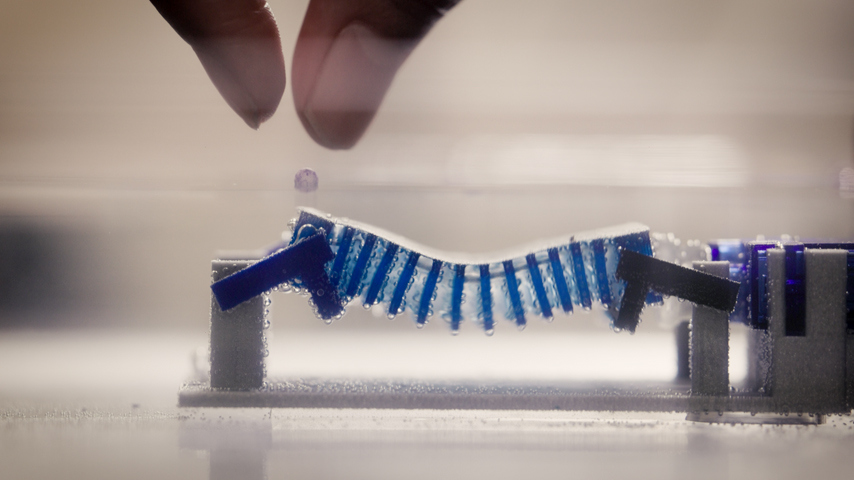
To create the snail-like robot, the team designed an undulator with a 3D-printed internal helix structure and an outer shell. When the bot pumps water, the internal helix creates a peristaltic or “traveling” wave along the outer shell. This traveling wave is a common biophysical process found in many living organisms—such as the human intestine. As the structure contracts, it is able to push whatever is inside through the canal. The undulator acts much the same way, contracting to push particles along the outer shell.
Become a Member: How to Join ASME
But unlike the human intestine, the snail or its robot counterpart do not have such a controlled environment. One of the engineering challenges in developing the bot was understanding how the force of the water would effect how the structure deforms. Also unlike the human body, the surface of the water is not linear. Finding the optimum value in which the bot was able to create or manipulate its own flow meant calculating the force and directional pull and tension at the water’s surface.
Through rigorous experimentation, the team was able to find optimum value and discover how the bot is able to successfully pull in particles. “We can collect a wide range of particles regardless of their size using this mechanism,” Jung said.
To build on their design, the next step will be to develop a drone system to deploy and house the snail-robot as it does its job, and begin studying the bot in different aquatic environments.
There are also many options for spin-off projects inspired by this design, including a new filtration system to clean fine dust particles inside mines, and a possible mechanism to collect vapors from the air—which would be ideal for water catchment in arid landscapes.
More for You: Using the Sun to Address Plastic Pollution
“Bio-inspiration is not about copying the exact design,” Jung said. “By just using the heart of the design, we can apply those bylaws of nature to many other engineering systems.”
One day, this snail-robot may be cleaning our oceans. In the meantime, Jung and his team are hopeful their work will open up new paths for those working on bio-inspired technologies that involve remote sensing and actuation within fluid environments.
Cassandra Kelly is a science and technology writer in Columbus, Ohio.
In their latest achievement, Cornell Professor and Director of Graduate Studies, Biological and Environmental Engineering, Sunghwan “Sunny” Jung and his team have developed an aquatic robot inspired by a snail that could one day rid oceans and lakes of microplastics.
Bio-inspired
Jung explains that bio-inspiration “for good” is how he and his team believe they can off-set the damaging impacts humans have had on the environment. “We overuse natural resources, and we waste a lot, especially plastics,” he said. “But we can learn a lot of things from biological systems to live in equilibrium with our environment and protect it.”
Sunny Jung, professor of biological and environmental engineering (far right) and study coauthors (from left), Jisoo Yuk, Chris Roh and Yicong Fu, watch a demonstration of their snail-inspired robot.
Photo: Jason Koski/Cornell University
Like snail’s food, many microplastics also tend to float on the surface of the water, and they are too small for current ocean-cleanup technologies to collect. Right now, popular mechanisms include large nets and conveyor-built systems that scoop up large debris like plastic bottles and containers. But microplastics remain and continue to break down into smaller and smaller pieces. These small particles are consumed by fish and other marine life at an alarming scale, blocking their digestive tracts and causing them to starve.
Snail robot
To create the snail-like robot, the team designed an undulator with a 3D-printed internal helix structure and an outer shell. When the bot pumps water, the internal helix creates a peristaltic or “traveling” wave along the outer shell. This traveling wave is a common biophysical process found in many living organisms—such as the human intestine. As the structure contracts, it is able to push whatever is inside through the canal. The undulator acts much the same way, contracting to push particles along the outer shell.
Become a Member: How to Join ASME
But unlike the human intestine, the snail or its robot counterpart do not have such a controlled environment. One of the engineering challenges in developing the bot was understanding how the force of the water would effect how the structure deforms. Also unlike the human body, the surface of the water is not linear. Finding the optimum value in which the bot was able to create or manipulate its own flow meant calculating the force and directional pull and tension at the water’s surface.
Optimum value
Through rigorous experimentation, the team was able to find optimum value and discover how the bot is able to successfully pull in particles. “We can collect a wide range of particles regardless of their size using this mechanism,” Jung said.
To build on their design, the next step will be to develop a drone system to deploy and house the snail-robot as it does its job, and begin studying the bot in different aquatic environments.
There are also many options for spin-off projects inspired by this design, including a new filtration system to clean fine dust particles inside mines, and a possible mechanism to collect vapors from the air—which would be ideal for water catchment in arid landscapes.
More for You: Using the Sun to Address Plastic Pollution
“Bio-inspiration is not about copying the exact design,” Jung said. “By just using the heart of the design, we can apply those bylaws of nature to many other engineering systems.”
One day, this snail-robot may be cleaning our oceans. In the meantime, Jung and his team are hopeful their work will open up new paths for those working on bio-inspired technologies that involve remote sensing and actuation within fluid environments.
Cassandra Kelly is a science and technology writer in Columbus, Ohio.
Cornell research team developed a snail-inspired aquatic robot that could one day rid oceans and lakes of microplastics.

Author and owner of Like-Minded Marketing
Related Content

Jul 24, 2026
Quiz: Extinct Classroom Engineering

Plenty of engineering innovations could be found in the classroom before computers and tablets took over. What do you remember about them?

Jul 13, 2026
Exoskeleton Improves Mobility for Stroke Survivors

University of Utah researchers are piloting a 5.5-pound wearable robotic solution to help individuals with hemiparesis walk.

Jul 9, 2026
A Portable Alternative to Mammograms

A new wearable ultrasound system generates real-time 3D breast images while reducing cost, improving comfort, and expanding access to screening.

Jul 2, 2026
Quiz: Engineering the American Revolution
Engineering ingenuity played a big part during the American Revolution. In honor of the U.S.’s 250th, test your knowledge about such solutions with this ASME quiz.