Robotic Worm to Navigate Through Human Brain
Robotic Worm to Navigate Through Human Brain

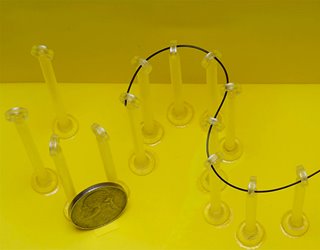
This robotic worm-like thread can easily glide through the brain’s blood vessels to treat strokes and aneurysms. Image: MIT
Mechanical engineers at the Massachusetts Institute of Technology (MIT) have created a soft, worm-like robot that can be steered with magnets to glide through narrow blood vessels of a human brain.
Today endovascular—inside the blood vessel—procedures involve the insertion of a thin guidewire, or catheter, through a patient’s artery, usually in the leg or groin. These guidewires are manipulated manually, which can generate friction and damage vessel linings if the wire is too stiff, or the surgeons push too hard.
Such procedures can be tiring and expose surgeons to repeated radiation from fluoroscopy. Although current robotic guidewires are used in heart procedures, they are too large to navigate the narrower blood vessels of the brain.
MIT engineers designed their robot to navigate using magnetic actuation, which is enabled by programming ferromagnetic particles distributed throughout its body. The ability to navigate through complex anatomical areas of a brain will revolutionize endovascular procedures—especially valuable for treating strokes.
 Engineers magnetically guided the robotic thread through a life-size silicone replica of the brain’s major blood vessels. Photo: MIT
“Stroke is the number five cause of death and a leading cause of disability in the United States,” said Xuanhe Zhao, associate professor of mechanical, civil, and environmental engineering at MIT and part of the robot development team. “If acute stroke can be treated within the first 90 minutes or so, survival rates increase significantly. If our device can reverse blood vessel blockage within this ‘golden hour’ of opportunity, we can potentially avoid permanent brain damage—that is our hope.”
Engineers magnetically guided the robotic thread through a life-size silicone replica of the brain’s major blood vessels. Photo: MIT
“Stroke is the number five cause of death and a leading cause of disability in the United States,” said Xuanhe Zhao, associate professor of mechanical, civil, and environmental engineering at MIT and part of the robot development team. “If acute stroke can be treated within the first 90 minutes or so, survival rates increase significantly. If our device can reverse blood vessel blockage within this ‘golden hour’ of opportunity, we can potentially avoid permanent brain damage—that is our hope.”
Further Reading: Non-invasive Technology Finds Coronary Artery Blockage
Their device is a magnetically steerable robotic thread with a hydrogel-coated exterior that allows it to glide easily through smaller blood vessels. To enhance flexibility, the core consists of a nickel-titanium alloy called nitinol that is bendable. Because it is solid metal, nitinol also provides the mechanical support and “pushability” needed for easy navigation.
The rest of the robot’s body is composed of a soft polymer matrix containing uniformly dispersed ferromagnetic microparticles as small as 5 micrometers. The polymer matrix can be either silicone or thermoplastic polyurethane elastomers, depending on the desired mechanical properties.
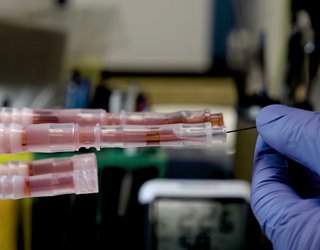
 The ferromagnetic soft robot can be steered remotely. Photo: MIT
The device is easily fabricated using 3D printing, extrusion, and injection molding technologies.
The ferromagnetic soft robot can be steered remotely. Photo: MIT
The device is easily fabricated using 3D printing, extrusion, and injection molding technologies.
A chemical process creates a hydrogel skin “that provides a hydrated, self-lubricating layer on the robot’s surface,” the study’s lead author Yoonho Kim said. “The silica shell coated around the embedded magnetic particles prevents their corrosion at the hydrated interface. The hydrogel skin, at a thickness of 10 to 25 micrometers, reduces the friction by more than ten times.”
When exposed to externally applied magnetic fields, “the embedded particles can be actuated remotely, while at the same time controlled accurately based on quantitative models,” he added.
Because the magnetic microparticles are easily detected by continuous x-ray systems, they help surgeons to remotely steer the guidewire through complex networks of veins and arteries.
Further Reading: Six Robots Helping Doctors Today
Using a large magnet, the researchers successfully tested the prototype by threading the robotic worm through a life-size silicone replica of the brain’s major blood vessels, including blockages and aneurysms. The robot thread was steered with precision through silicone vessels filled with a liquid simulating the viscosity of blood.
 Researchers hope to test their device in vivo next. Photo: MIT
Encouraged by these highly successful results, the engineering team is now working on expanding the capabilities of the device.
Researchers hope to test their device in vivo next. Photo: MIT
Encouraged by these highly successful results, the engineering team is now working on expanding the capabilities of the device.
For example, they plan to add other functions to the robotic thread, such as the ability to deliver clot-reducing drugs or break up blockages with laser light. MIT researchers replaced the thread’s nitinol core with an optical fiber and found they could still magnetically steer the robot and activate the laser once the robot reached its target site.
“We have demonstrated the capability of navigating through complex and constrained environments,” Kim said. “We have also demonstrated additional functionalities, such as steerable laser delivery through a functional core incorporated in the robot’s body.
“Given its compact, self-contained actuation and intuitive manipulation, we hope our ferromagnetic soft robot opens avenues for minimally invasive robotic surgery for previously inaccessible lesions, thereby addressing challenges and unmet needs in healthcare.”
Mark Crawford is a technology writer based in New Mexico.
Today endovascular—inside the blood vessel—procedures involve the insertion of a thin guidewire, or catheter, through a patient’s artery, usually in the leg or groin. These guidewires are manipulated manually, which can generate friction and damage vessel linings if the wire is too stiff, or the surgeons push too hard.
Such procedures can be tiring and expose surgeons to repeated radiation from fluoroscopy. Although current robotic guidewires are used in heart procedures, they are too large to navigate the narrower blood vessels of the brain.
MIT engineers designed their robot to navigate using magnetic actuation, which is enabled by programming ferromagnetic particles distributed throughout its body. The ability to navigate through complex anatomical areas of a brain will revolutionize endovascular procedures—especially valuable for treating strokes.
Engineers magnetically guided the robotic thread through a life-size silicone replica of the brain’s major blood vessels. Photo: MIT
Further Reading: Non-invasive Technology Finds Coronary Artery Blockage
Their device is a magnetically steerable robotic thread with a hydrogel-coated exterior that allows it to glide easily through smaller blood vessels. To enhance flexibility, the core consists of a nickel-titanium alloy called nitinol that is bendable. Because it is solid metal, nitinol also provides the mechanical support and “pushability” needed for easy navigation.
The rest of the robot’s body is composed of a soft polymer matrix containing uniformly dispersed ferromagnetic microparticles as small as 5 micrometers. The polymer matrix can be either silicone or thermoplastic polyurethane elastomers, depending on the desired mechanical properties.
The ferromagnetic soft robot can be steered remotely. Photo: MIT
A chemical process creates a hydrogel skin “that provides a hydrated, self-lubricating layer on the robot’s surface,” the study’s lead author Yoonho Kim said. “The silica shell coated around the embedded magnetic particles prevents their corrosion at the hydrated interface. The hydrogel skin, at a thickness of 10 to 25 micrometers, reduces the friction by more than ten times.”
When exposed to externally applied magnetic fields, “the embedded particles can be actuated remotely, while at the same time controlled accurately based on quantitative models,” he added.
Because the magnetic microparticles are easily detected by continuous x-ray systems, they help surgeons to remotely steer the guidewire through complex networks of veins and arteries.
Further Reading: Six Robots Helping Doctors Today
Using a large magnet, the researchers successfully tested the prototype by threading the robotic worm through a life-size silicone replica of the brain’s major blood vessels, including blockages and aneurysms. The robot thread was steered with precision through silicone vessels filled with a liquid simulating the viscosity of blood.
Researchers hope to test their device in vivo next. Photo: MIT
For example, they plan to add other functions to the robotic thread, such as the ability to deliver clot-reducing drugs or break up blockages with laser light. MIT researchers replaced the thread’s nitinol core with an optical fiber and found they could still magnetically steer the robot and activate the laser once the robot reached its target site.
“We have demonstrated the capability of navigating through complex and constrained environments,” Kim said. “We have also demonstrated additional functionalities, such as steerable laser delivery through a functional core incorporated in the robot’s body.
“Given its compact, self-contained actuation and intuitive manipulation, we hope our ferromagnetic soft robot opens avenues for minimally invasive robotic surgery for previously inaccessible lesions, thereby addressing challenges and unmet needs in healthcare.”
Mark Crawford is a technology writer based in New Mexico.
This robotic worm-like thread can easily glide through the brain’s blood vessels to treat strokes and aneurysms. Image: MIT

Writer and editor at MC2 Solutions
Related Content

Jul 13, 2026
Exoskeleton Improves Mobility for Stroke Survivors

University of Utah researchers are piloting a 5.5-pound wearable robotic solution to help individuals with hemiparesis walk.

Jun 22, 2026
Blaze-Battling Bots Ahead
A novel system that uses AI-powered robots to extinguish fires could eliminate the need to put firefighters in dangerous situations.

May 21, 2026
Touchless Movement Through Fluidic Torque

Fluid-generated torque generated by microrobot swarms can move passive objects in surprising ways—without the need for physical contact.

May 19, 2026
Soft Robots Made Fast and Cheap

A new ultra-low-cost fabrication method makes soft robots faster and cheaper to build, opening the field to wider use in research and education.