Big Data Spurs Autonomous Tunneling
Big Data Spurs Autonomous Tunneling

A worker inspects equipment on the front shield of a TBM, behind cutterhead. Photo: GAMUDA
Building subsurface infrastructure has long been a dirty and dangerous job. Specialized miners (known as sandhogs in New York) work alongside massive tunnel boring machines to build spaces deep underground for transportation or utilities. With diameters reaching 17.5 meters, tunnel boring machines (TBMs) slowly grind their way through a host of geologic formations ranging from hard rock to loosen soil and sands. They are high-tech mechanical machines, and, as in other industries, sensors and operational systems relay large amounts of real-time data to operators who adjust the drive accordingly.
TBMs are indispensable, but labor can prove to be a bottleneck. The work is so specialized that miners travel the world from job to job. With the tunneling market growing globally, competition for skilled operators is great. Unlike other industries, while some tasks may be automated, advancing the TBM is not. That is an anomaly when automation, machine learning, and artificial intelligence are the tools transforming industry.
Until recently. In Kuala Lumpur, contractors harnessed digital engineering tools to autonomously operate a fleet of 12 tunnel boring machines driving a path for a new subway system. The joint venture contractor, MMC Gamuda, has successfully brought Big Data to tunneling through software that allow the TBMS to drive and correct themselves.
Workers recently finished the last piece of tunnel for Kuala Lumpur’s second metro line, capping a program where tunneling machines have been operating remotely since 2016. Getting to that point took a poke by a seasoned tunneling director and TBM manager who found an unlikely duo of young, computer savvy, code-writing engineers who brought steering, advancement, excavation, and slurry operations under one operating system.
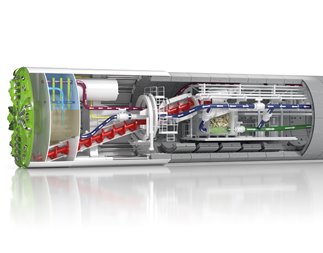 In a variable density TBM, either air or slurry is pumped to the front of the chamber behind the cutterhead to maintain balance, and muck is removed through a screw conveyor. The conveyor can be replaced with tubing to remove slurry if it works in slurry mode. Image: Herrenknecht AG.
Just as important, it took the backing of the owner, Mass Transit Rail Corporation, to even allow them to try. Pushing the envelope can be a slow process when money is on the line. Tunnels are expensive. The two Kuala Lumpur transit tunnels represent an investment of more than $6 billion. TBMs cost tens of millions of dollars, a significant investment for a contractor. Owners want the job done as fast as possible for a contracted amount of money and contractors must perform or face severe financial penalties. In real time, the combination makes for an extremely conservative line of work.
In a variable density TBM, either air or slurry is pumped to the front of the chamber behind the cutterhead to maintain balance, and muck is removed through a screw conveyor. The conveyor can be replaced with tubing to remove slurry if it works in slurry mode. Image: Herrenknecht AG.
Just as important, it took the backing of the owner, Mass Transit Rail Corporation, to even allow them to try. Pushing the envelope can be a slow process when money is on the line. Tunnels are expensive. The two Kuala Lumpur transit tunnels represent an investment of more than $6 billion. TBMs cost tens of millions of dollars, a significant investment for a contractor. Owners want the job done as fast as possible for a contracted amount of money and contractors must perform or face severe financial penalties. In real time, the combination makes for an extremely conservative line of work.
Boring any kind of tunnel requires operators to monitor a number of conditions and adjust speed and pressure to keep the TBM moving. Earth pressure balance machines have been the go-to TBM for moving through variable soft ground conditions and a high water table. An EPB has an articulated shield that provides sealed protection against pressurized water inflows. Behind the cutterhead, a pressurized chamber controls stability at the face of the machine. Pressure from behind provides balance with the pressure in front of the cutterhead, and gives the machine its name.
Editor's Choice: The Autonomous Technology Collection
Muck from behind the cutterhead and in front of the pressure bulkhead is removed with a screw conveyor. Operators also must control the speed and discharge rate to control pressure at the working face, and the rate of discharge must also match the TBM’s advance rate. At the rear of the TBM, an automated system picks up, moves, rotates and places concrete rings that finish the tunnel segments. When a segment is complete, the TBM pushes off those rings to advance. (In tunneling, advancement is measured in rings.)
Slurry TBMs are another choice, but primarily for soils with high water volume. They also are shielded, but instead of sending pressurized air behind the cutter head to maintain balance, they use a bentonite slurry to build up a muck screen at the face. Muck and the slurry are removed through a system of slurry pipes.
The underlying geology of Malaysia’s capital region is less than ideal for either option. Kuala Lumpur’s metro line is being built through the Klang Valley, and tunnels must pass through karstic limestone, known for being unstable and chocked with voids, often filled with low-cohesive soil. Three other geologic formations further complicated planning.
When Line 1 was being planned, German TBM manufacturer Herrenknecht and Gamuda developed the variable density TBM. It made tunneling through fractured karst more reliable. The variable-density TBM can operate in EPB and conventional slurry mode. But it also uses a high-density slurry designed to prevent surface blowouts, an event that can happen when slurry injected at the machine’s head fills networks of cracks and fissures leading to the surface.
A big advantage of the variable-density TBM is its ability to work in different ground conditions, and change modes without any mechanical modifications in the excavation chamber or behind, in the tunnel area. Gamuda electrical manager Russell Batty said changing the mode of operation is done gradually over about a week while maintaining full control of the face. It provides safer operation because workers avoid the hazardous task of entering the chamber to change modes.
The new machines worked well on the first contract—indeed, eight of the TBMs from the first contract could be refurbished to work the second. But Gamuda faced additional issues with the second contract over the number of skilled operators needed to work 12 TBMs required for the scope of work.
 Kuala Lumper’s tunnelers broke new ground in producing a system to drive their TBMs autonomously. Photo: GAMUDA
“This started with from a need to efficiently man numerous TBMs running concurrently in the project,” said Ng Hau Wei, Gamuda’s executive director and head of tunneling.
Kuala Lumper’s tunnelers broke new ground in producing a system to drive their TBMs autonomously. Photo: GAMUDA
“This started with from a need to efficiently man numerous TBMs running concurrently in the project,” said Ng Hau Wei, Gamuda’s executive director and head of tunneling.
First, Gamuda built a simulator to train potential operators, and later for early work on the autonomous system. “We established this operator simulator which basically enabled us to drive a TBM from a control cabin without actually being in the TBM,” said Batty.
Also pushing autonomous operation was Gamuda’s tunneling director, Gustav Klados. He championed the first effort to autonomously advance a TBM in the early 1990s on a hard rock water tunnel in Leostho. It was a crude system but it worked, and until Kuala Lumpur, had not been replicated. “I did not see why we couldn’t, with the technology now available, and especially computing power,” he said.
With Ng as project sponsor, Klados and Batty put a three-person development team together with two young staff engineers who wrote coding and produced a “plug and play AI control system.” It was tested on a simulator before applied to the TBMs.
The system consists of a series of computers, each of which controls one function: steering, advancement, excavation, and slurry operations. Those are connected to a program logic controller that ties everything together.
Reader's Choice: The Digital Engineering Collection
“We have a computer that talks to the PLC, as does the steering computer, as does the data acquisition computer and so on. So, if you like, the PLC is the hub,” said Batty. “All of the different systems interact with that, exchanging data. Since the guidance computer is connected to the same hub, it is able to read coordinates from the steering computer via the PLC, and therefore we can calculate with algorithms the error from where we should be. The computer then inputs more data to the PLC, which controls equipment that guides the machine back to where it’s meant to be. So there’s a constant checking of where we are, and then small adjustments made to bring it back to where it’s meant to be.”
Ng said the team “basically built the system from scratch,” building on algorithms already available from autonomously operated vehicles. “The fact that somebody did it in the nineties gave us a lot of confidence that it could be done, but we didn’t have enough to build on from that,” he said.
After getting approval to develop the system, Batty found Lim Ji Xiong almost through happenstance. Liew Kit Shin was already on staff, and Lim in another department. A broken arm kept him from his normal duties when Batty struck up a conversation and found his background could be of help. “Since then, they’ve done all the code writing,” he said.
Conventional TBMs are fitted with a bristling array of sensors that send mounds of data to the operator, allowing the team to leverage those existing systems for the autonomous controls.
“If you look at it, the TBM in itself has already got all of the sensors and feedback from all the components whether or not it’s automated,” said Ng. “The operators are seeing all of these feedbacks and values on the screen and the operators are manually trying to adjust. We’re pretty much trying to codify what the human operator would do.”
The engineers started with automating the steering system, and then moved to advancement, excavation and slurry operations. Human operators must concentrate on each system simultaneously, which the contractor said results in slower reaction times and an inability to optimize efficiency.
That can be magnified when using multiple TBMs because individual operators will work the machine differently, often in competition, pushing to maximize speed, excavation, and ring placement. That may lead to unexpected or unscheduled maintenance issues with the cutterhead or other components.
“Your human operator will naturally push the machine as hard as he can,” said Batty. “Because he wants to do six rings, after doing five. The computer is not in competition with anybody. If an average of 4.5 rings is the best to do, you’ll get 4.5 rings and won’t have the stoppages [from pushing the machine to extremes]. Then things fail, you get breakdown of equipment, damage on the cutterhead and extensive delays. The computer avoids that by not putting all of that stress on the machine.”
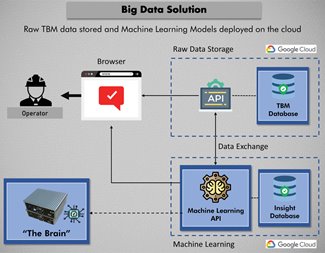 TBM is integrated with inhouse Big Data solution to automatically generate predictive and prescriptive analytics/insights. Image: GAMUDA
That also leads to longer term gains when the job is finished. TBMs are refurbished for use on the next project, and those costs can be reduced because the autonomous system puts less stress on the machine.
TBM is integrated with inhouse Big Data solution to automatically generate predictive and prescriptive analytics/insights. Image: GAMUDA
That also leads to longer term gains when the job is finished. TBMs are refurbished for use on the next project, and those costs can be reduced because the autonomous system puts less stress on the machine.
Adapting to changing ground conditions during tunneling and predicting when maintenance is needed also can be done faster and more efficiently with the automated system. Data is the key. MMC Gamuda’s system was uploaded with data from its previous work on Line 1, performed in similar geology, as well as data gathered from the simulator. During the current work, it has successfully predicted maintenance needs for items such as wear on the cutterhead, said Batty.
The team also reports improved stability and productivity as the algorithms sample data every three seconds to provide corrective feedback to the TBM. It automatically adjusts speed of advancement when damage to the cutterhead is detected, and controls he speed of the screw conveyor to maintain pressure at the face. For slurry mode, it calculates the most efficient speed for the pumps to ensure a stable excavation. More basically, it selects the best driving method offered by the TBM based on real-time ground conditions.
More for You: The Clean Energy Collection
“That’s where Big Data comes in,” Batty said. “To a large extent, tunneling has been very reactionary. Stuff happens and you react to it, fix the problem that has already occurred. We’re aiming to prevent by predicting. We can see, using algorithms, what is likely to be around the corner and we can avoid a problem.”
The result is a three-button plug-and-play operating system whose development cost less than $15,000, Batty said. An operator sitting in above-ground control shed simply pushes a button to start or stop the machine, or begin ring construction. Because the system is so new, owner MTRC required operators be stationed in their traditional work location within the TBM. In reality, they have little to do because the system has been so successful, says the contractor.
As in other industries, operators saw the system as a threat to their jobs, noted Batty. But he believes it also is a tool they can exploit to better improve their skills when working traditionally. Allowing the system to control the TBM also frees the operator to better analyze the reams of data the TBM generates, something not possible in manual operation.
“You have to remember that 99 percent of the machines in the world don’t have this system,” he said. “And they all need operators. If you watch what the computer does and how it steers the machine, you can actually learn something and be a better operator when you don’t have the computer doing it for you.”
What has prevented prior development of an autonomous tunneling system? There are liability issues, noted Michael Mooney, a professor of tunneling and underground construction at the Colorado School of Mines. There’s not much incentive for a manufacturer when claims on large tunneling projects are not uncommon, he noted. It’s one more complicated element that could go wrong.
While the Kuala Lumpur project is now wrapping up, MMC Gamuda is taking the next steps to improve their system. Together with its simulator, the contractor will set up one of its TBMs in a maintenance storage yard to build a cloud-based system, blending ring segment installation into it, and operated through a phone app. It hopes to finish the upgrade in time to start another job in the second half of this year.
John Kosowatz is senior editor.
TBMs are indispensable, but labor can prove to be a bottleneck. The work is so specialized that miners travel the world from job to job. With the tunneling market growing globally, competition for skilled operators is great. Unlike other industries, while some tasks may be automated, advancing the TBM is not. That is an anomaly when automation, machine learning, and artificial intelligence are the tools transforming industry.
Until recently. In Kuala Lumpur, contractors harnessed digital engineering tools to autonomously operate a fleet of 12 tunnel boring machines driving a path for a new subway system. The joint venture contractor, MMC Gamuda, has successfully brought Big Data to tunneling through software that allow the TBMS to drive and correct themselves.
Workers recently finished the last piece of tunnel for Kuala Lumpur’s second metro line, capping a program where tunneling machines have been operating remotely since 2016. Getting to that point took a poke by a seasoned tunneling director and TBM manager who found an unlikely duo of young, computer savvy, code-writing engineers who brought steering, advancement, excavation, and slurry operations under one operating system.
In a variable density TBM, either air or slurry is pumped to the front of the chamber behind the cutterhead to maintain balance, and muck is removed through a screw conveyor. The conveyor can be replaced with tubing to remove slurry if it works in slurry mode. Image: Herrenknecht AG.
Giant Machines
Boring any kind of tunnel requires operators to monitor a number of conditions and adjust speed and pressure to keep the TBM moving. Earth pressure balance machines have been the go-to TBM for moving through variable soft ground conditions and a high water table. An EPB has an articulated shield that provides sealed protection against pressurized water inflows. Behind the cutterhead, a pressurized chamber controls stability at the face of the machine. Pressure from behind provides balance with the pressure in front of the cutterhead, and gives the machine its name.
Editor's Choice: The Autonomous Technology Collection
Muck from behind the cutterhead and in front of the pressure bulkhead is removed with a screw conveyor. Operators also must control the speed and discharge rate to control pressure at the working face, and the rate of discharge must also match the TBM’s advance rate. At the rear of the TBM, an automated system picks up, moves, rotates and places concrete rings that finish the tunnel segments. When a segment is complete, the TBM pushes off those rings to advance. (In tunneling, advancement is measured in rings.)
Slurry TBMs are another choice, but primarily for soils with high water volume. They also are shielded, but instead of sending pressurized air behind the cutter head to maintain balance, they use a bentonite slurry to build up a muck screen at the face. Muck and the slurry are removed through a system of slurry pipes.
The underlying geology of Malaysia’s capital region is less than ideal for either option. Kuala Lumpur’s metro line is being built through the Klang Valley, and tunnels must pass through karstic limestone, known for being unstable and chocked with voids, often filled with low-cohesive soil. Three other geologic formations further complicated planning.
When Line 1 was being planned, German TBM manufacturer Herrenknecht and Gamuda developed the variable density TBM. It made tunneling through fractured karst more reliable. The variable-density TBM can operate in EPB and conventional slurry mode. But it also uses a high-density slurry designed to prevent surface blowouts, an event that can happen when slurry injected at the machine’s head fills networks of cracks and fissures leading to the surface.
A big advantage of the variable-density TBM is its ability to work in different ground conditions, and change modes without any mechanical modifications in the excavation chamber or behind, in the tunnel area. Gamuda electrical manager Russell Batty said changing the mode of operation is done gradually over about a week while maintaining full control of the face. It provides safer operation because workers avoid the hazardous task of entering the chamber to change modes.
The new machines worked well on the first contract—indeed, eight of the TBMs from the first contract could be refurbished to work the second. But Gamuda faced additional issues with the second contract over the number of skilled operators needed to work 12 TBMs required for the scope of work.
Kuala Lumper’s tunnelers broke new ground in producing a system to drive their TBMs autonomously. Photo: GAMUDA
First, Gamuda built a simulator to train potential operators, and later for early work on the autonomous system. “We established this operator simulator which basically enabled us to drive a TBM from a control cabin without actually being in the TBM,” said Batty.
Also pushing autonomous operation was Gamuda’s tunneling director, Gustav Klados. He championed the first effort to autonomously advance a TBM in the early 1990s on a hard rock water tunnel in Leostho. It was a crude system but it worked, and until Kuala Lumpur, had not been replicated. “I did not see why we couldn’t, with the technology now available, and especially computing power,” he said.
With Ng as project sponsor, Klados and Batty put a three-person development team together with two young staff engineers who wrote coding and produced a “plug and play AI control system.” It was tested on a simulator before applied to the TBMs.
The system consists of a series of computers, each of which controls one function: steering, advancement, excavation, and slurry operations. Those are connected to a program logic controller that ties everything together.
Reader's Choice: The Digital Engineering Collection
“We have a computer that talks to the PLC, as does the steering computer, as does the data acquisition computer and so on. So, if you like, the PLC is the hub,” said Batty. “All of the different systems interact with that, exchanging data. Since the guidance computer is connected to the same hub, it is able to read coordinates from the steering computer via the PLC, and therefore we can calculate with algorithms the error from where we should be. The computer then inputs more data to the PLC, which controls equipment that guides the machine back to where it’s meant to be. So there’s a constant checking of where we are, and then small adjustments made to bring it back to where it’s meant to be.”
Ng said the team “basically built the system from scratch,” building on algorithms already available from autonomously operated vehicles. “The fact that somebody did it in the nineties gave us a lot of confidence that it could be done, but we didn’t have enough to build on from that,” he said.
After getting approval to develop the system, Batty found Lim Ji Xiong almost through happenstance. Liew Kit Shin was already on staff, and Lim in another department. A broken arm kept him from his normal duties when Batty struck up a conversation and found his background could be of help. “Since then, they’ve done all the code writing,” he said.
Steady Going
Conventional TBMs are fitted with a bristling array of sensors that send mounds of data to the operator, allowing the team to leverage those existing systems for the autonomous controls.
“If you look at it, the TBM in itself has already got all of the sensors and feedback from all the components whether or not it’s automated,” said Ng. “The operators are seeing all of these feedbacks and values on the screen and the operators are manually trying to adjust. We’re pretty much trying to codify what the human operator would do.”
The engineers started with automating the steering system, and then moved to advancement, excavation and slurry operations. Human operators must concentrate on each system simultaneously, which the contractor said results in slower reaction times and an inability to optimize efficiency.
That can be magnified when using multiple TBMs because individual operators will work the machine differently, often in competition, pushing to maximize speed, excavation, and ring placement. That may lead to unexpected or unscheduled maintenance issues with the cutterhead or other components.
“Your human operator will naturally push the machine as hard as he can,” said Batty. “Because he wants to do six rings, after doing five. The computer is not in competition with anybody. If an average of 4.5 rings is the best to do, you’ll get 4.5 rings and won’t have the stoppages [from pushing the machine to extremes]. Then things fail, you get breakdown of equipment, damage on the cutterhead and extensive delays. The computer avoids that by not putting all of that stress on the machine.”
TBM is integrated with inhouse Big Data solution to automatically generate predictive and prescriptive analytics/insights. Image: GAMUDA
Adapting to changing ground conditions during tunneling and predicting when maintenance is needed also can be done faster and more efficiently with the automated system. Data is the key. MMC Gamuda’s system was uploaded with data from its previous work on Line 1, performed in similar geology, as well as data gathered from the simulator. During the current work, it has successfully predicted maintenance needs for items such as wear on the cutterhead, said Batty.
The team also reports improved stability and productivity as the algorithms sample data every three seconds to provide corrective feedback to the TBM. It automatically adjusts speed of advancement when damage to the cutterhead is detected, and controls he speed of the screw conveyor to maintain pressure at the face. For slurry mode, it calculates the most efficient speed for the pumps to ensure a stable excavation. More basically, it selects the best driving method offered by the TBM based on real-time ground conditions.
More for You: The Clean Energy Collection
“That’s where Big Data comes in,” Batty said. “To a large extent, tunneling has been very reactionary. Stuff happens and you react to it, fix the problem that has already occurred. We’re aiming to prevent by predicting. We can see, using algorithms, what is likely to be around the corner and we can avoid a problem.”
The result is a three-button plug-and-play operating system whose development cost less than $15,000, Batty said. An operator sitting in above-ground control shed simply pushes a button to start or stop the machine, or begin ring construction. Because the system is so new, owner MTRC required operators be stationed in their traditional work location within the TBM. In reality, they have little to do because the system has been so successful, says the contractor.
The Next Phase
As in other industries, operators saw the system as a threat to their jobs, noted Batty. But he believes it also is a tool they can exploit to better improve their skills when working traditionally. Allowing the system to control the TBM also frees the operator to better analyze the reams of data the TBM generates, something not possible in manual operation.
“You have to remember that 99 percent of the machines in the world don’t have this system,” he said. “And they all need operators. If you watch what the computer does and how it steers the machine, you can actually learn something and be a better operator when you don’t have the computer doing it for you.”
What has prevented prior development of an autonomous tunneling system? There are liability issues, noted Michael Mooney, a professor of tunneling and underground construction at the Colorado School of Mines. There’s not much incentive for a manufacturer when claims on large tunneling projects are not uncommon, he noted. It’s one more complicated element that could go wrong.
While the Kuala Lumpur project is now wrapping up, MMC Gamuda is taking the next steps to improve their system. Together with its simulator, the contractor will set up one of its TBMs in a maintenance storage yard to build a cloud-based system, blending ring segment installation into it, and operated through a phone app. It hopes to finish the upgrade in time to start another job in the second half of this year.
John Kosowatz is senior editor.
A worker inspects equipment on the front shield of a TBM, behind cutterhead. Photo: GAMUDA
Related Content

Jun 22, 2026
Blaze-Battling Bots Ahead

A novel system that uses AI-powered robots to extinguish fires could eliminate the need to put firefighters in dangerous situations.

May 21, 2026
Touchless Movement Through Fluidic Torque

Fluid-generated torque generated by microrobot swarms can move passive objects in surprising ways—without the need for physical contact.

May 19, 2026
Soft Robots Made Fast and Cheap

A new ultra-low-cost fabrication method makes soft robots faster and cheaper to build, opening the field to wider use in research and education.

Mar 17, 2026
An Inflatable Apple Picker

An expandable soft robot can gently pluck a piece of fruit in around 25 seconds.