Autonomous Sub for Icy Great Lakes
Autonomous Sub for Icy Great Lakes
The risks of research beneath the ice have led to the development and testing of innovative solutions like the Saab Sabertooth autonomous underwater vessel.
The Great Lakes are vast inland freshwater seas, and they still harbor many mysteries to researchers. Getting good data, especially in winter, has been a challenge. Recently, scientists from the Great Lakes Environmental Research Laboratory (GLERL), a National Oceanic and Atmospheric Administration (NOAA) freshwater research lab, collaborated with Hibbard Inshore, an industry partner, to test a Saab Sabertooth autonomous underwater vessel (AUV).
The goal was to obtain crucial data on the water quality, fish, zooplankton, phytoplankton, and overall health of the lakes.
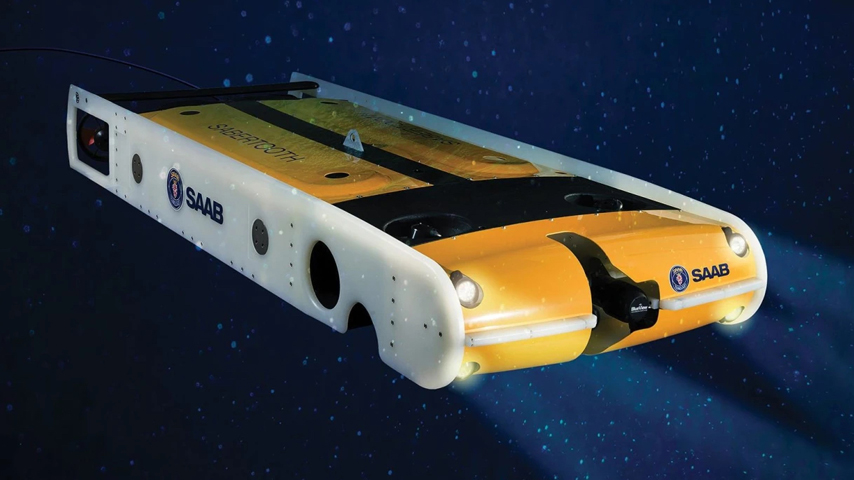
 Photo: Saab
The Saab Sabertooth AUV has a remote docking station and hydrogen fuel cell for self-charging and data uploads. The vessel was successfully able to automatically depart through the Muskegon shipping channel, collect data, return to its docking station for communication, upload data, and further instructions. The AUV, programmable for specific missions, can be operated from shore through acoustical links as well as fully autonomous operation.
Photo: Saab
The Saab Sabertooth AUV has a remote docking station and hydrogen fuel cell for self-charging and data uploads. The vessel was successfully able to automatically depart through the Muskegon shipping channel, collect data, return to its docking station for communication, upload data, and further instructions. The AUV, programmable for specific missions, can be operated from shore through acoustical links as well as fully autonomous operation.
Hibbard’s prior experience navigating the Sabertooth in tunnels eased its under-ice demonstration.
“It has lots and lots of power and you can put almost any sensor on it. We demonstrated that if it does a one-day mission, it comes back to that docking station, recharges, delivers its data, then goes back out and keeps doing the mission repeatedly,” said Steve Ruberg, a NOAA researcher working on the development of environmental measurement technology in the Great Lakes.
In the past, research vessels and buoys have had to dock or be pulled out of the water at the beginning of winter due to ice cover and the limited accessibility and high cost of ice breaking vessels. Ice cover on the Great Lakes is sparse this year, but at times it can reach more than 90 percent. However, “in the wintertime even if the lakes are not frozen, on a really cold day, the ice buildup on boats and buoys causes them to tip over or be destroyed once they turn into a giant ball of ice,” Ruberg said. “We would then lose our observational capability.”
Constrained budgets and differing objectives often plague underwater exploration, fostering individual team efforts rather than a cohesive approach. To overcome some of the ice traverse limitations, researchers looked to AUVs. The underwater drones weren’t without issues.
Quiz: What Do You Know About Submarine Engineering?
Even with uncrewed marine vessels, accessing and collecting data posed challenges due to ice cover. Tethered vessels offered constant contact with operators, but limited access to ice-breaking ships posed challenges in cold weather conditions.
AUVs, launched from a nearby ship or land, operated on battery power for navigation, data collection, and communication with onshore operators. Researchers customized AUVs with various sensors, cameras, beacons, and tools for mission-specific data collection, but the additional tools increased battery consumption and limited travel distance. Cold water derated battery performance, further reducing travel and mission time. Standard AUVs, reliant on GPS or acoustic signals for communications and navigation, were hindered by ice cover, leading to occasional misplacement by operators due to signal loss.
 Photo: Saab
“There's a multilayered approach to success under the ice, and it’s based on the reliability of your hardware, duration, launch and recovery, and access. If you can't get your vessel in the water under ice, it doesn't matter what it can do,” said Amy Kukulya, founder of SciBotics LLC, a leading authority in oceanographic robotics, techniques, sensors, and their dynamic application.
Photo: Saab
“There's a multilayered approach to success under the ice, and it’s based on the reliability of your hardware, duration, launch and recovery, and access. If you can't get your vessel in the water under ice, it doesn't matter what it can do,” said Amy Kukulya, founder of SciBotics LLC, a leading authority in oceanographic robotics, techniques, sensors, and their dynamic application.
Even on shorter missions, weather could impact a researcher’s ability to access the vessel and data. It was common for a four-day mission to turn into 10 when weather inhibited recovery of the vessel.
The AUVs collect data and store it on board, with the operator only able to download the data once the vessel is removed from the water. When an AUV is lost, even temporarily, researchers risk access to all the data it had collected. To combat this, researchers try to plan for every eventuality by loading the robot with beacons, lights, and other recovery tools to aid in a potential search.
Video: Underwater Mapping Robot
“I’ve had to use everything I’ve ever integrated into a robot to be able to find it if it was lost. Most robots that have gone under ice never come back to where they are supposed to,” Kukulya said.
Various uncrewed research vessels exist, each with distinct advantages and drawbacks. Researchers must tailor choices to mission requirements, as there’s no one-size-fits-all solution. Prioritizing critical features is crucial; for instance, faster vessels collecting more data consume more battery power, limiting mission duration. Vessel capabilities, such as sensor handling and remote device control, vary, requiring careful consideration.
Become a Member: How to Join ASME
Using uncrewed marine vessels, researchers explored the Great Lakes to gather vital data on water quality, fish, zooplankton, phytoplankton, and overall lake health. This data will help researchers to understand the impact of climate change amongst other things.
Researchers faced challenges in navigating under ice, leading to the development and testing of innovative solutions like tethered and autonomous vessels. The risks of Great Lakes winter research are similar to oceanic exploration, “but the odds of getting your vessel back in the Great Lakes are a lot higher,” Kukulya said.
Nicole Imeson is a technology writer in Calgary, Alta.
The goal was to obtain crucial data on the water quality, fish, zooplankton, phytoplankton, and overall health of the lakes.
Photo: Saab
Hibbard’s prior experience navigating the Sabertooth in tunnels eased its under-ice demonstration.
“It has lots and lots of power and you can put almost any sensor on it. We demonstrated that if it does a one-day mission, it comes back to that docking station, recharges, delivers its data, then goes back out and keeps doing the mission repeatedly,” said Steve Ruberg, a NOAA researcher working on the development of environmental measurement technology in the Great Lakes.
Winter research limitations
In the past, research vessels and buoys have had to dock or be pulled out of the water at the beginning of winter due to ice cover and the limited accessibility and high cost of ice breaking vessels. Ice cover on the Great Lakes is sparse this year, but at times it can reach more than 90 percent. However, “in the wintertime even if the lakes are not frozen, on a really cold day, the ice buildup on boats and buoys causes them to tip over or be destroyed once they turn into a giant ball of ice,” Ruberg said. “We would then lose our observational capability.”Constrained budgets and differing objectives often plague underwater exploration, fostering individual team efforts rather than a cohesive approach. To overcome some of the ice traverse limitations, researchers looked to AUVs. The underwater drones weren’t without issues.
Quiz: What Do You Know About Submarine Engineering?
Even with uncrewed marine vessels, accessing and collecting data posed challenges due to ice cover. Tethered vessels offered constant contact with operators, but limited access to ice-breaking ships posed challenges in cold weather conditions.
AUVs, launched from a nearby ship or land, operated on battery power for navigation, data collection, and communication with onshore operators. Researchers customized AUVs with various sensors, cameras, beacons, and tools for mission-specific data collection, but the additional tools increased battery consumption and limited travel distance. Cold water derated battery performance, further reducing travel and mission time. Standard AUVs, reliant on GPS or acoustic signals for communications and navigation, were hindered by ice cover, leading to occasional misplacement by operators due to signal loss.
Photo: Saab
Even on shorter missions, weather could impact a researcher’s ability to access the vessel and data. It was common for a four-day mission to turn into 10 when weather inhibited recovery of the vessel.
The AUVs collect data and store it on board, with the operator only able to download the data once the vessel is removed from the water. When an AUV is lost, even temporarily, researchers risk access to all the data it had collected. To combat this, researchers try to plan for every eventuality by loading the robot with beacons, lights, and other recovery tools to aid in a potential search.
Video: Underwater Mapping Robot
“I’ve had to use everything I’ve ever integrated into a robot to be able to find it if it was lost. Most robots that have gone under ice never come back to where they are supposed to,” Kukulya said.
Various uncrewed research vessels exist, each with distinct advantages and drawbacks. Researchers must tailor choices to mission requirements, as there’s no one-size-fits-all solution. Prioritizing critical features is crucial; for instance, faster vessels collecting more data consume more battery power, limiting mission duration. Vessel capabilities, such as sensor handling and remote device control, vary, requiring careful consideration.
Become a Member: How to Join ASME
Using uncrewed marine vessels, researchers explored the Great Lakes to gather vital data on water quality, fish, zooplankton, phytoplankton, and overall lake health. This data will help researchers to understand the impact of climate change amongst other things.
Researchers faced challenges in navigating under ice, leading to the development and testing of innovative solutions like tethered and autonomous vessels. The risks of Great Lakes winter research are similar to oceanic exploration, “but the odds of getting your vessel back in the Great Lakes are a lot higher,” Kukulya said.
Nicole Imeson is a technology writer in Calgary, Alta.

Technology is rapidly changing the world we live in. Explore content covering the latest trends in autonomous technology including artificial intelligence, self-driving cars, and automation.