A Robot to Weed Your Garden
A Robot to Weed Your Garden

Billed as the first autonomous weeding robot for home gardeners, Tertill spends its time from spring until winter living in gardens 24x7 roaming around mowing down weeds. Photo: Franklin Robotics
A co-inventor of the most successful consumer robot in history, the Roomba, has shifted his focus from inside a home to outside and this season is introducing Tertill (pronounced turtle), billed as the first weeding robot available for home gardeners.
Autonomous, solar-powered and equipped with four-wheel drive, Tertill is designed to live in a flower or vegetable garden from spring until winter roaming around rain or shine looking for small weeds and whacking them using a spinning string trimmer. On-board sensors in the 8.25-inch round robot keep it from going astray and from hitting rocks. Unusual high camber-angle wheels put the point of support out to the edge of the robot to help prevent it from tipping over and keep them out of the way of the whacker.
Joe Jones first envisioned an autonomous robotic vacuum cleaner when he was working at Massachusetts Institute of Technology’s Artificial Intelligence Lab in the late 1980s. It took until the early part of this century when his employer at the time, iRobot, decided to fund work to make it a reality.
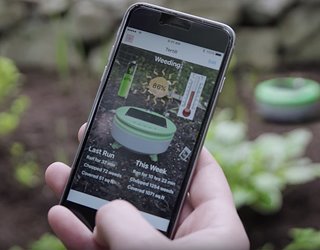 Tertill uses Bluetooth to send and receive information from the user’s smartphone. Photo: Franklin Robotics
Tertill too has had somewhat of a long germination period for a different reason. Jones, now co-founder and CTO of Franklin Robotics, has been interested in finding uses for robots in agriculture for some time because of the many seemingly potential applications for robots on farms. But for him, choosing the right application is the hardest part. He thought about weeding farm fields, but couldn’t come up with a solution that he thought was better than those others have been working on.
Tertill uses Bluetooth to send and receive information from the user’s smartphone. Photo: Franklin Robotics
Tertill too has had somewhat of a long germination period for a different reason. Jones, now co-founder and CTO of Franklin Robotics, has been interested in finding uses for robots in agriculture for some time because of the many seemingly potential applications for robots on farms. But for him, choosing the right application is the hardest part. He thought about weeding farm fields, but couldn’t come up with a solution that he thought was better than those others have been working on.
“So there wasn’t any point in pursuing it,” he said. “Robotics is really hard. It’s not the engineering itself that’s hard. The application is a challenge. You have to pick an application where robots can exploit their strengths and not suffer from their weaknesses. You have to pick your area very carefully,” he said.
Then during a casual conversation at a conference, an acquaintance suggested a robot that weeds home gardens. It was an a-ha moment. That changed the problem just enough so that he could make a product that would be cost-effective because he could use a different approach for a garden weeder than for a farm field weeder.
The approach that roboticists are taking for farm fields is to discriminate between weeds and crops visually using sensors. “That’s at the edge of what can be done and even perhaps beyond the edge of what can be done reliably,” he believes.
Instead of using a visual identification approach, he chose a mechanical solution. “Tertill discriminates between weeds and crops solely on height. Any plant short enough to go under the bumper, Tertill identifies as a weed and cuts it down. Any crop that’s tall enough to touch the front bumper is identified as a plant that you want, and it turns away from it,” Jones said.
However, Jones pointed out a problem that is obvious immediately: what happens if there are some seedlings that the gardener doesn’t want the robot to cut down. The solution for a home garden is easy, Jones added, install a plant collar designed and sold by the company. It’s a tiny cage that is placed around each sprout that signals the robot to leave it along.
“That makes a good solution for a home garden because … the typical garden size in the US is only 100 sq. ft., (the size garden Tertill is designed for), so even if you had to put a plant collar around every seedling, it’s still not too much of a burden, especially since you don’t ever have to weed again,” Jones said. “On 1,000 acres of corn, that wouldn’t be a good solution.”
All of the challenges were not so easily solved. Probably the biggest was mobility. The robot has to be small to maneuver among desirable plants to attack the weeds, but the smaller it gets, the less room there is for essential components. Research into the kinds of plants people use and how far apart they are led to an ideal size of about 8-inches in diameter.
When a robot is that small and has to drive over uneven terrain, rocks, and ruts, that’s a challenge, Jones said. He and his team spent about a year trying to meet that challenge. They started with a two-wheel-drive somewhat round robot. It worked moving around the garden but wasn’t effective enough climbing a hill. The next version employed four-wheel drive because it could climb a steeper hill, and was rectangular, but after experimentation, rectangular didn’t work so it was back to round.
“It’s really hard to pack four wheels into a round robot and still have a nice wide wheelbase so that it won’t tip over when going up, down or across slopes. That was where we got to the distinctive high camber-angle wheels,” Jones said.
At 45-degrees, the wheels are many times more cambered than the 2-to-3 degrees of camber for a car. The team went through something like six iterations over a year to build something that could do the job in a garden environment.”
Tertill, which will still do some patrolling on a cloudy day from stored energy in a battery, needs little tending once it’s placed in the garden. Depending on the type of soil, only the string trimmer may have to be replaced occasionally.
 To prevent Tertill from weeding seedlings accidentally, place a plant collar around the seedlings to inform Tertill that it is a future plant, not a weed. Photo: Franklin Robotics
Tertill has pleasantly surprised the developers in one way that may lead Jones back to his desire to find a mechanical solution for agricultural fields. The team thought the robot would work by finding weeds an inch or so tall and chop them down with the whacker. It turns out what appears to be killing most of the weeds is the continuous patrolling of Tertill, which has tiny grousers, or treads, on the wheels, disturbing the soil just as germination is taking place and the sprouts never can establish a strong root system.
To prevent Tertill from weeding seedlings accidentally, place a plant collar around the seedlings to inform Tertill that it is a future plant, not a weed. Photo: Franklin Robotics
Tertill has pleasantly surprised the developers in one way that may lead Jones back to his desire to find a mechanical solution for agricultural fields. The team thought the robot would work by finding weeds an inch or so tall and chop them down with the whacker. It turns out what appears to be killing most of the weeds is the continuous patrolling of Tertill, which has tiny grousers, or treads, on the wheels, disturbing the soil just as germination is taking place and the sprouts never can establish a strong root system.
“If so, this is a completely new modality for weed killing that we hadn’t thought about,” Jones said. “Maybe we can build a robot that doesn’t need a whacker at all that just kills the weeds by rolling around. That’s cool because it means I can build a robot of any size to kill weeds, one smaller than the Tertill we have now or bigger that goes into farm fields. The mechanical eradication of weeds is a much better solution than herbicide use. That’s where we are hoping to get to.”
Nancy Giges is an independent writer.
Autonomous, solar-powered and equipped with four-wheel drive, Tertill is designed to live in a flower or vegetable garden from spring until winter roaming around rain or shine looking for small weeds and whacking them using a spinning string trimmer. On-board sensors in the 8.25-inch round robot keep it from going astray and from hitting rocks. Unusual high camber-angle wheels put the point of support out to the edge of the robot to help prevent it from tipping over and keep them out of the way of the whacker.
Joe Jones first envisioned an autonomous robotic vacuum cleaner when he was working at Massachusetts Institute of Technology’s Artificial Intelligence Lab in the late 1980s. It took until the early part of this century when his employer at the time, iRobot, decided to fund work to make it a reality.
Tertill uses Bluetooth to send and receive information from the user’s smartphone. Photo: Franklin Robotics
“So there wasn’t any point in pursuing it,” he said. “Robotics is really hard. It’s not the engineering itself that’s hard. The application is a challenge. You have to pick an application where robots can exploit their strengths and not suffer from their weaknesses. You have to pick your area very carefully,” he said.
Then during a casual conversation at a conference, an acquaintance suggested a robot that weeds home gardens. It was an a-ha moment. That changed the problem just enough so that he could make a product that would be cost-effective because he could use a different approach for a garden weeder than for a farm field weeder.
The approach that roboticists are taking for farm fields is to discriminate between weeds and crops visually using sensors. “That’s at the edge of what can be done and even perhaps beyond the edge of what can be done reliably,” he believes.
Instead of using a visual identification approach, he chose a mechanical solution. “Tertill discriminates between weeds and crops solely on height. Any plant short enough to go under the bumper, Tertill identifies as a weed and cuts it down. Any crop that’s tall enough to touch the front bumper is identified as a plant that you want, and it turns away from it,” Jones said.
However, Jones pointed out a problem that is obvious immediately: what happens if there are some seedlings that the gardener doesn’t want the robot to cut down. The solution for a home garden is easy, Jones added, install a plant collar designed and sold by the company. It’s a tiny cage that is placed around each sprout that signals the robot to leave it along.
“That makes a good solution for a home garden because … the typical garden size in the US is only 100 sq. ft., (the size garden Tertill is designed for), so even if you had to put a plant collar around every seedling, it’s still not too much of a burden, especially since you don’t ever have to weed again,” Jones said. “On 1,000 acres of corn, that wouldn’t be a good solution.”
All of the challenges were not so easily solved. Probably the biggest was mobility. The robot has to be small to maneuver among desirable plants to attack the weeds, but the smaller it gets, the less room there is for essential components. Research into the kinds of plants people use and how far apart they are led to an ideal size of about 8-inches in diameter.
When a robot is that small and has to drive over uneven terrain, rocks, and ruts, that’s a challenge, Jones said. He and his team spent about a year trying to meet that challenge. They started with a two-wheel-drive somewhat round robot. It worked moving around the garden but wasn’t effective enough climbing a hill. The next version employed four-wheel drive because it could climb a steeper hill, and was rectangular, but after experimentation, rectangular didn’t work so it was back to round.
“It’s really hard to pack four wheels into a round robot and still have a nice wide wheelbase so that it won’t tip over when going up, down or across slopes. That was where we got to the distinctive high camber-angle wheels,” Jones said.
At 45-degrees, the wheels are many times more cambered than the 2-to-3 degrees of camber for a car. The team went through something like six iterations over a year to build something that could do the job in a garden environment.”
Tertill, which will still do some patrolling on a cloudy day from stored energy in a battery, needs little tending once it’s placed in the garden. Depending on the type of soil, only the string trimmer may have to be replaced occasionally.
To prevent Tertill from weeding seedlings accidentally, place a plant collar around the seedlings to inform Tertill that it is a future plant, not a weed. Photo: Franklin Robotics
“If so, this is a completely new modality for weed killing that we hadn’t thought about,” Jones said. “Maybe we can build a robot that doesn’t need a whacker at all that just kills the weeds by rolling around. That’s cool because it means I can build a robot of any size to kill weeds, one smaller than the Tertill we have now or bigger that goes into farm fields. The mechanical eradication of weeds is a much better solution than herbicide use. That’s where we are hoping to get to.”
Nancy Giges is an independent writer.
Billed as the first autonomous weeding robot for home gardeners, Tertill spends its time from spring until winter living in gardens 24x7 roaming around mowing down weeds. Photo: Franklin Robotics
Related Content

Jul 13, 2026
Exoskeleton Improves Mobility for Stroke Survivors

University of Utah researchers are piloting a 5.5-pound wearable robotic solution to help individuals with hemiparesis walk.

Jun 22, 2026
Blaze-Battling Bots Ahead

A novel system that uses AI-powered robots to extinguish fires could eliminate the need to put firefighters in dangerous situations.

May 21, 2026
Touchless Movement Through Fluidic Torque

Fluid-generated torque generated by microrobot swarms can move passive objects in surprising ways—without the need for physical contact.

May 19, 2026
Soft Robots Made Fast and Cheap

A new ultra-low-cost fabrication method makes soft robots faster and cheaper to build, opening the field to wider use in research and education.