5 of the Most Influential Early Robots
5 of the Most Influential Early Robots

Today’s advanced robots have humble beginnings. Image: Boston Robotics
Date Updated: October 24, 2024
Many of today’s most exciting robots have their roots in systems that were invented decades ago. These pioneering robots were truly revolutionary, created before anyone knew what a factory robot should look like or how an autonomous robot might behave.
These early systems established the archetypes of most of the robots we see today, from factory and warehouse robots to autonomous package delivery drones and subsea maintenance vessels. Here are just a few of the early pioneers in the field of robotics.
1961 Unimate
 Unimate, the first industrial robot. Photo: Kawasaki Heavy Industries
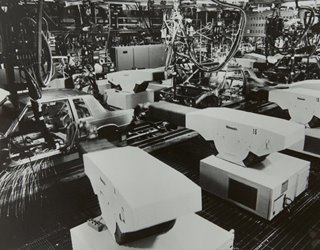
Unimate was the first industrial robot, the first robotic arm, and the first robot that did work once done by humans. Its inventor, George Devol, derived the name for his company, Unimation, from “universal automation,” the idea that this automated tool could perform a variety of different tasks.
Unimate, the first industrial robot. Photo: Kawasaki Heavy Industries
Unimate was the first industrial robot, the first robotic arm, and the first robot that did work once done by humans. Its inventor, George Devol, derived the name for his company, Unimation, from “universal automation,” the idea that this automated tool could perform a variety of different tasks.
The technology was so new that Devol’s 1954 patent did not contain a single prior citation. The patent was not granted until 1961. That year, GM put the first Unimate to work at a factory in Ewing, N.J., where it lifted door handles and other metal parts from hot molds and dipped them into cooling liquids.
Further Reading: Rise and Fall of Rethink Robotics
The original Unimate weighed 4,000 lbs. and featured several Devol inventions, including drum memory (a precursor of today’s hard drives) and precision encoders. Unimate made its television debut in 1966, when it appeared on Johnny Carson and putted a golf ball into a cup, poured a beer, and even conducted the Tonight Show band.
1972 Shakey
 Shakey, the first autonomous robot. Photo: SRI International
William Grey Walter of the Burden Neurological Institute in England demonstrated that robots could “explore” their environment and follow a light to a recharging station in 1949 without human control.
Shakey, the first autonomous robot. Photo: SRI International
William Grey Walter of the Burden Neurological Institute in England demonstrated that robots could “explore” their environment and follow a light to a recharging station in 1949 without human control.
Shakey, however, was the first truly autonomous robot. Developed at the Artificial Intelligence Center of Stanford Research Institute (now SRI International) and funded by DARPA, Shakey could break down simple commands into a specific sequence of actions needed to achieve a goal.
An operator might, for example, type a command to push a block off a platform. Shakey would then locate the block, find a ramp to reach it, push the ramp to the platform, drive up the ramp, and perform the task.
In addition to showcasing computer reasoning, Shakey represented true breakthroughs in natural language ability and computer vision. It’s A* search algorithm is still used today to plot paths between two points.
1994 ABE
 ABE, the pioneering autonomous underwater vehicle. Photo: National Oceanic and Atmospheric Administration
ABE is the progenitor of autonomous submersibles used for scientific research, exploration, and offshore infrastructure inspection. The Autonomous Benthic Explorer was created by the Woods Hole Oceanographic Institution.
ABE, the pioneering autonomous underwater vehicle. Photo: National Oceanic and Atmospheric Administration
ABE is the progenitor of autonomous submersibles used for scientific research, exploration, and offshore infrastructure inspection. The Autonomous Benthic Explorer was created by the Woods Hole Oceanographic Institution.
Unlike human-occupied or tethered subs, ABE could autonomously survey large subsea regions for up to one day. Although it started with a preplanned dive path, ABE could avoid collisions and move in for a closer look if it sensed unusual chemicals or undersea biomes. It then swam back to recharge.
1995 Predator
 Predator steered the era of drone warfare. Photo: US Air Force
General Atomics’ Predator put drones on the map. The remotely piloted aircraft was originally designed for reconnaissance, but by 2002 many were flying strike missions in Afghanistan equipped with Hellfire missiles.
Predator steered the era of drone warfare. Photo: US Air Force
General Atomics’ Predator put drones on the map. The remotely piloted aircraft was originally designed for reconnaissance, but by 2002 many were flying strike missions in Afghanistan equipped with Hellfire missiles.
Predator began life as Amber, invented by the Israeli Air Force’s former chief designer, Abraham Karem, after he migrated to the United States. When Karem’s company went belly up, the CIA stepped in to fund further development. In 1994, it awarded General Atomics a contract to continue development.
The first Predators were deployed in the Balkans in the summer of 1995 and later in Iraq, Afghanistan, Libya, and Syria. Powered by a single, rear-mounted propeller engine, the drone can fly up to 460 miles to a target, cruise overhead for up to 14 hours, and then return to base.
It uses a variety of sophisticated cameras and sensors. Over time, the several-second time lag between pilot command and aircraft action has been virtually eliminated.
1997 Mars Sojourner Rover
 Sojourner, the first rover on Mars. Photo: NASA
Mars Pathfinder’s Sojourner rover was humanity’s first robotic mission to another celestial body. It landed on Mars on an auspicious day: July 4, 1997.
Sojourner, the first rover on Mars. Photo: NASA
Mars Pathfinder’s Sojourner rover was humanity’s first robotic mission to another celestial body. It landed on Mars on an auspicious day: July 4, 1997.
Further Reading: Top 10 Space Missions Set to Explore New Frontiers
Yet its performance over the next three months was the true cause for celebration. The 23 lb. semi-autonomous device was designed to last just seven days. Instead, this bot continued to explore 2700 sq. ft. of the Martian surface for 83 days, taking pictures and collecting and measuring samples.
The semi-autonomous wheeled robot accepted general commands from NASA but could plan its own routes and avoid obstacles without prior detailed knowledge of its environment.
More sophisticated probes followed Sojourner, including Spirit, Opportunity (which lasted 14 years), and Curiosity, which is still going strong after more than a decade.
Alan S. Brown is senior editor.
Many of today’s most exciting robots have their roots in systems that were invented decades ago. These pioneering robots were truly revolutionary, created before anyone knew what a factory robot should look like or how an autonomous robot might behave.
These early systems established the archetypes of most of the robots we see today, from factory and warehouse robots to autonomous package delivery drones and subsea maintenance vessels. Here are just a few of the early pioneers in the field of robotics.
1961 Unimate
Unimate, the first industrial robot. Photo: Kawasaki Heavy Industries
The technology was so new that Devol’s 1954 patent did not contain a single prior citation. The patent was not granted until 1961. That year, GM put the first Unimate to work at a factory in Ewing, N.J., where it lifted door handles and other metal parts from hot molds and dipped them into cooling liquids.
Further Reading: Rise and Fall of Rethink Robotics
The original Unimate weighed 4,000 lbs. and featured several Devol inventions, including drum memory (a precursor of today’s hard drives) and precision encoders. Unimate made its television debut in 1966, when it appeared on Johnny Carson and putted a golf ball into a cup, poured a beer, and even conducted the Tonight Show band.
1972 Shakey
Shakey, the first autonomous robot. Photo: SRI International
Shakey, however, was the first truly autonomous robot. Developed at the Artificial Intelligence Center of Stanford Research Institute (now SRI International) and funded by DARPA, Shakey could break down simple commands into a specific sequence of actions needed to achieve a goal.
An operator might, for example, type a command to push a block off a platform. Shakey would then locate the block, find a ramp to reach it, push the ramp to the platform, drive up the ramp, and perform the task.
In addition to showcasing computer reasoning, Shakey represented true breakthroughs in natural language ability and computer vision. It’s A* search algorithm is still used today to plot paths between two points.
1994 ABE
ABE, the pioneering autonomous underwater vehicle. Photo: National Oceanic and Atmospheric Administration
Unlike human-occupied or tethered subs, ABE could autonomously survey large subsea regions for up to one day. Although it started with a preplanned dive path, ABE could avoid collisions and move in for a closer look if it sensed unusual chemicals or undersea biomes. It then swam back to recharge.
1995 Predator
Predator steered the era of drone warfare. Photo: US Air Force
Predator began life as Amber, invented by the Israeli Air Force’s former chief designer, Abraham Karem, after he migrated to the United States. When Karem’s company went belly up, the CIA stepped in to fund further development. In 1994, it awarded General Atomics a contract to continue development.
The first Predators were deployed in the Balkans in the summer of 1995 and later in Iraq, Afghanistan, Libya, and Syria. Powered by a single, rear-mounted propeller engine, the drone can fly up to 460 miles to a target, cruise overhead for up to 14 hours, and then return to base.
It uses a variety of sophisticated cameras and sensors. Over time, the several-second time lag between pilot command and aircraft action has been virtually eliminated.
1997 Mars Sojourner Rover
Sojourner, the first rover on Mars. Photo: NASA
Further Reading: Top 10 Space Missions Set to Explore New Frontiers
Yet its performance over the next three months was the true cause for celebration. The 23 lb. semi-autonomous device was designed to last just seven days. Instead, this bot continued to explore 2700 sq. ft. of the Martian surface for 83 days, taking pictures and collecting and measuring samples.
The semi-autonomous wheeled robot accepted general commands from NASA but could plan its own routes and avoid obstacles without prior detailed knowledge of its environment.
More sophisticated probes followed Sojourner, including Spirit, Opportunity (which lasted 14 years), and Curiosity, which is still going strong after more than a decade.
Alan S. Brown is senior editor.
Today’s advanced robots have humble beginnings. Image: Boston Robotics
Related Content

Jan 6, 2025
Robot Assistance that Starts at the Knees

Researchers at the University of Michigan have developed a motorized assistive device to better support lifting and carrying. The hope is to avert back injury.

Oct 22, 2024
Exoskeleton Control Improved Through Machine Learning

Special control software controls the electric motors so that the exoskeleton can match its movements to the patient’s intention. A machine learning algorithm may provide better control.
Apr 24, 2024
ChatGPT Shows Promise as Teaching Tool
Researchers found that ChatGPT could pass the licensed engineer exam while exploring how AI could facilitate learning and teaching.

Jan 5, 2024
Quiz: A Quick Look at Robots in the Field
Robots, IoT devices, and GPS are hallmarks of precision agriculture. See what you know in the fast quiz.