E-BAR: An Assistive Device Redefining Elderly Care
E-BAR: An Assistive Device Redefining Elderly Care
.jpg?width=854&height=691&ext=.jpg)
What if a robot could move like a caregiver—matching your stride, adjusting in real time, and even catching you if you fell?
As the world’s aging population continues to increase, so too do the devastating impacts of a fall. Above heart disease and stroke, the injury and trauma of a fall is the leading cause of death for the elderly population.
Even a minor fall can lead to the rapid decline of a person’s overall health. Regardless of the level of care a person is receiving, most falls occur in private when they are using the restroom or getting dressed, which can mean lying on the floor for long periods without anyone to assist them.
Understanding the risks and concerns faced by the elderly population is at the heart of a newly developed assistive robot from the Massachusetts Institute of Technology. The robot, called the Elderly Bodily Assistance Robot or “E-BAR,” has been designed to stabilize a person as they navigate precarious situations and catch them gently if they fall – much like a human would.
“Oftentimes handles will be installed on the walls in bathrooms to help people, but those handles are in a fixed location,” explained Harry Asada, MIT engineering professor and director of the d’Arbeloff Laboratory for Information Systems and Technology.
E-BAR does just that through a system of 18 interconnected links that raise a U-shaped fork with strategically positioned handlebars, which can adjust its height and position in real-time to match a person’s gait and movements.
The ingenuity of this design comes from a decade of dedication from Asada’s team. For years, they’d been trying to develop robotic devices capable of physically assisting humans. Still, it wasn’t until they started hearing from older adults that they were able to have a breakthrough.
“Adoption wasn’t great at first, and we needed a better understanding,” Asada said, sharing about how he spoke with people at nursing homes and what he learned. “If a person isn’t tech savvy, or if they’re wary of technology, they may not want to use the machine. It is hard for them to accept any kind of aid. They want to have some dignity.”
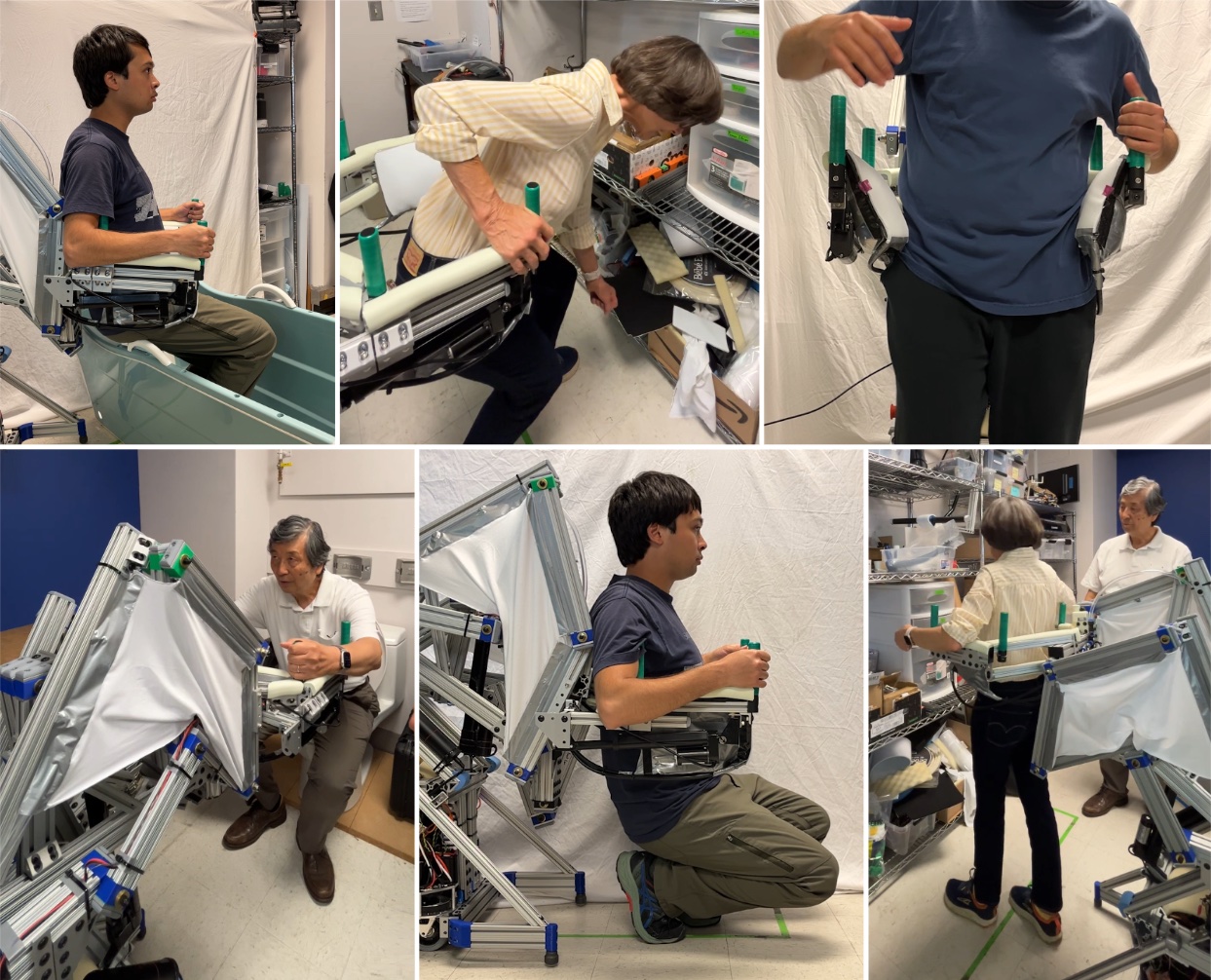
 MIT engineers are refining the prototype, aiming for a slimmer build that can easily navigate tight spaces. Image: MIT’s d’Arbeloff Laboratory for Information Systems and Technology
MIT engineers are refining the prototype, aiming for a slimmer build that can easily navigate tight spaces. Image: MIT’s d’Arbeloff Laboratory for Information Systems and Technology
Building on this feedback, Roberto Bolli, a graduate student at MIT, collaborated with Asada and made significant modifications to previous design paradigms. The first was removing any harness, which are clunky and make it difficult for people to move independently. To supplement this lack of physical connection to the machine, Bolli designed a system that could move in tandem with a person without actually touching them, consisting of both rigid components and rapidly inflatable airbags for applying a holding force to the hips. This required numerous iterations of design and testing to find a form factor that was amenable to the human body.
In response, the machine can offer support only when needed, via both passive load-bearing and active fall-catching mechanisms. However, this was no easy feat, and the computational optimization of balancing conflicting design parameters was a significant challenge.
“We wanted to make the drive base as small as possible because we wanted it to be able to fit through common household doors, which are as narrow as 28 inches wide,” Bolli explained. “We also wanted to make sure it was stable enough, so that it would never tip, even if a person put their entire body weight onto the fork.”
Bolli continued, “So we weighed each of these parameters in a computational optimization to understand how much force could be applied, the needed mass for the drive base, the length and width of the base, the height of the fork, and so on, and we translated those parameters directly into the final prototype.”
At its current phase, the drive base of the bot weighs 220 pounds and has wheels with a high coefficient of friction comparable to that of a car tire. This ensures a robust grip on the floor, allowing the robot to move with confidence and resist unwanted slippage, even when supporting a person’s full weight.
“We reviewed military studies that had been done in the 80s and 90s that explored the maximum forward force a person could apply while standing up,” Bolli elaborated. “For our machine, it needed to be able to catch someone at many different angles. So, we determined how much lateral force it needed to withstand if it was extended all the way up versus the vertical force needed in the event that it had to lift someone up.”
From there, Bolli received feedback from medical professionals about what else the device needed, which resulted in the addition of padding for the handles and airbags that would deploy in the event of needing to catch someone, break their fall, and hold them upright if they were also unconscious.
The airbags were thoughtfully made from a specialized neoprene rubber and strategically placed in a “surround sound” configuration to maximize contact area with the person. Combined with a remarkably low inflation pressure of just 10-15 PSI, the E-BAR can gently yet firmly support an individual in a falling position and prevent bruising while still providing the necessary lifting force. The airbags also inflate quickly, capable of responding within 250 ms of an anticipated fall.
While E-BAR represents a significant leap forward in assistive technology, the team at MIT isn’t done yet, as its ongoing research focuses on transitioning the device from its current manually controlled operation to intelligent automation.
“It’s been an incredibly fulfilling project,” Bolli shared. “Sometimes I feel like it’s easy to get caught up in theoretical algorithms and mathematical optimizations, but a project like this makes you ask yourself, ‘How does this actually affect people?’”
Beyond E-BAR, Asada's broader vision is for robots to interact safely with humans in everyday life, from elder care to childcare.
“We see that the biggest application for robots in the market is to take care of people,” Asada said. “The fundamental challenge has been whether a machine can truly touch humans and be acceptable and safe. What we are finding is that when we have a machine that can interact with humans safely, it could have a huge impact.”
Cassandra Kelly is a technology writer in Columbus, Ohio.
Even a minor fall can lead to the rapid decline of a person’s overall health. Regardless of the level of care a person is receiving, most falls occur in private when they are using the restroom or getting dressed, which can mean lying on the floor for long periods without anyone to assist them.
Understanding the risks and concerns faced by the elderly population is at the heart of a newly developed assistive robot from the Massachusetts Institute of Technology. The robot, called the Elderly Bodily Assistance Robot or “E-BAR,” has been designed to stabilize a person as they navigate precarious situations and catch them gently if they fall – much like a human would.
“Oftentimes handles will be installed on the walls in bathrooms to help people, but those handles are in a fixed location,” explained Harry Asada, MIT engineering professor and director of the d’Arbeloff Laboratory for Information Systems and Technology.
E-BAR does just that through a system of 18 interconnected links that raise a U-shaped fork with strategically positioned handlebars, which can adjust its height and position in real-time to match a person’s gait and movements.
Designing dignity into robotics
The ingenuity of this design comes from a decade of dedication from Asada’s team. For years, they’d been trying to develop robotic devices capable of physically assisting humans. Still, it wasn’t until they started hearing from older adults that they were able to have a breakthrough.
“Adoption wasn’t great at first, and we needed a better understanding,” Asada said, sharing about how he spoke with people at nursing homes and what he learned. “If a person isn’t tech savvy, or if they’re wary of technology, they may not want to use the machine. It is hard for them to accept any kind of aid. They want to have some dignity.”
MIT engineers are refining the prototype, aiming for a slimmer build that can easily navigate tight spaces. Image: MIT’s d’Arbeloff Laboratory for Information Systems and Technology
Building on this feedback, Roberto Bolli, a graduate student at MIT, collaborated with Asada and made significant modifications to previous design paradigms. The first was removing any harness, which are clunky and make it difficult for people to move independently. To supplement this lack of physical connection to the machine, Bolli designed a system that could move in tandem with a person without actually touching them, consisting of both rigid components and rapidly inflatable airbags for applying a holding force to the hips. This required numerous iterations of design and testing to find a form factor that was amenable to the human body.
Engineering safety in motion
In response, the machine can offer support only when needed, via both passive load-bearing and active fall-catching mechanisms. However, this was no easy feat, and the computational optimization of balancing conflicting design parameters was a significant challenge.
“We wanted to make the drive base as small as possible because we wanted it to be able to fit through common household doors, which are as narrow as 28 inches wide,” Bolli explained. “We also wanted to make sure it was stable enough, so that it would never tip, even if a person put their entire body weight onto the fork.”
Bolli continued, “So we weighed each of these parameters in a computational optimization to understand how much force could be applied, the needed mass for the drive base, the length and width of the base, the height of the fork, and so on, and we translated those parameters directly into the final prototype.”
At its current phase, the drive base of the bot weighs 220 pounds and has wheels with a high coefficient of friction comparable to that of a car tire. This ensures a robust grip on the floor, allowing the robot to move with confidence and resist unwanted slippage, even when supporting a person’s full weight.
“We reviewed military studies that had been done in the 80s and 90s that explored the maximum forward force a person could apply while standing up,” Bolli elaborated. “For our machine, it needed to be able to catch someone at many different angles. So, we determined how much lateral force it needed to withstand if it was extended all the way up versus the vertical force needed in the event that it had to lift someone up.”
From there, Bolli received feedback from medical professionals about what else the device needed, which resulted in the addition of padding for the handles and airbags that would deploy in the event of needing to catch someone, break their fall, and hold them upright if they were also unconscious.
The airbags were thoughtfully made from a specialized neoprene rubber and strategically placed in a “surround sound” configuration to maximize contact area with the person. Combined with a remarkably low inflation pressure of just 10-15 PSI, the E-BAR can gently yet firmly support an individual in a falling position and prevent bruising while still providing the necessary lifting force. The airbags also inflate quickly, capable of responding within 250 ms of an anticipated fall.
From manual support to smart assistance
While E-BAR represents a significant leap forward in assistive technology, the team at MIT isn’t done yet, as its ongoing research focuses on transitioning the device from its current manually controlled operation to intelligent automation.
“It’s been an incredibly fulfilling project,” Bolli shared. “Sometimes I feel like it’s easy to get caught up in theoretical algorithms and mathematical optimizations, but a project like this makes you ask yourself, ‘How does this actually affect people?’”
Beyond E-BAR, Asada's broader vision is for robots to interact safely with humans in everyday life, from elder care to childcare.
“We see that the biggest application for robots in the market is to take care of people,” Asada said. “The fundamental challenge has been whether a machine can truly touch humans and be acceptable and safe. What we are finding is that when we have a machine that can interact with humans safely, it could have a huge impact.”
Cassandra Kelly is a technology writer in Columbus, Ohio.
What if a robot could move like a caregiver—matching your stride, adjusting in real time, and even catching you if you fell?
Related Content

Sep 10, 2025
Blog: Play-Powered Engineering—From Puppets to Inclusive Toys

Aug 13, 2025
Robotics Blog: Where Vibration Becomes Vibe

Aug 5, 2025
Spatial Navigation Through a New LENS

May 19, 2025
Pressurized Haptic Sleeve Breaks New Ground in Wearables
New wearable has implications for social and medical applications as the knitted sleeve allows wearers to relate with the world through pressure-based haptics.