Different Strokes for Different Bots
Different Strokes for Different Bots
How do you make the fastest swimming robot? Make it do the butterfly.
Biomimetic engineers don’t always draw their ideas directly from plant or beast. Sometimes inspiration has a few degrees of separation to it. If, for instance, you want to create a fast, soft-bodied, electronics-free, swimming robot, you might want to look not to sea creatures, but to humans imitating butterflies at the pool.
That’s just what Jie Yin, a professor of mechanical and aerospace engineering at North Carolina State University, has done. His robot, what he calls a butterfly bot, works much like a human swimmer doing one of the harder moves in the chlorinated stuff. “With the butterfly stroke, the arms are like wings,” he said. “They, flap, but they also should rotate, and your body should undulate. That’s very similar to our robot.”
What’s different is the speed. If measuring by body length, the butterfly bot beats a human doing the butterfly stroke, or any other stroke, hands down, and it’s arguably the fastest swimming robot on the planet.
The secret to its speed comes from its bistable wings. Like a hairclip, they stay rigid in one position till forced past their snapping point, then they pop into a second natural stable state. Thanks to that pop, the wings release a tremendous amount of energy with each stroke, propelling the robot forward at a rate of 3.74 body lengths a second.
Become a Member: How to Join ASME
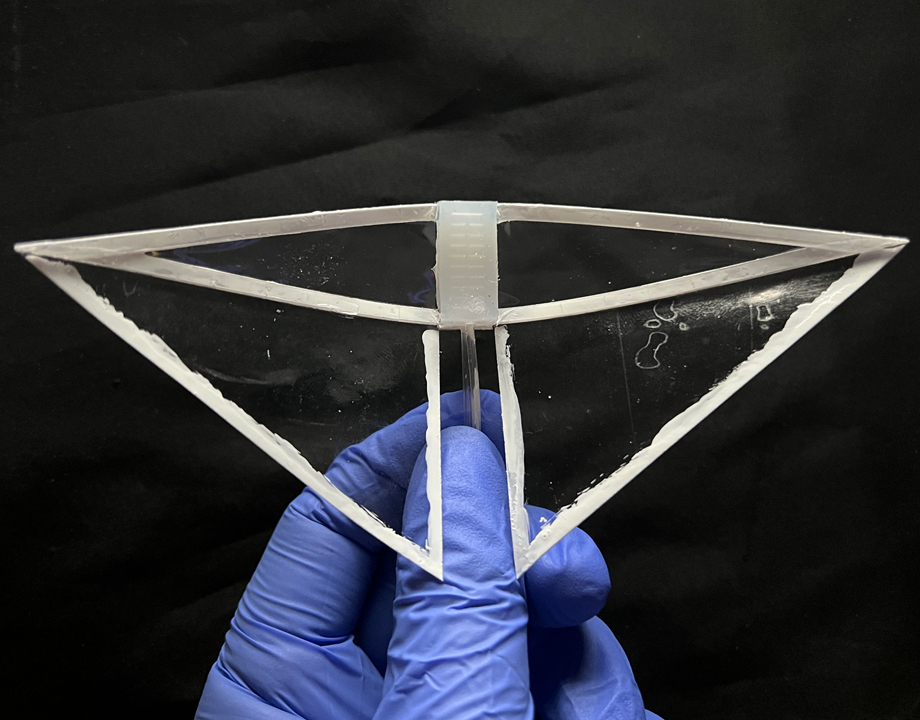
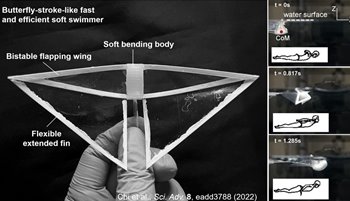 Photo: North Carolina State University
Photo: North Carolina State University
The reason a human huffing it down the lap pool with the butterfly stroke is the most analogous animal behavior to the robot, is that both the machine and the swimmer go through the water partially submerged. A butterfly, of course, stays fully submerged in its fluid. A manta ray is not too far off the mark, and it can swim at the surface, but, in addition to flapping, its wings ripple to help propel it forward. The butterfly bot, at top speed, is 90 percent submerged while it swims, with its wings popping into the air only at the stop of its stroke, much like the arms of, say, Caeleb Dressel. The robot can swim underwater as well, albeit at slower speeds.
In addition to the stereo version, where the two wings are connected and snap back and forth in unison, Yin and his team made another, where the wings flap independently. Giving each wing independence does slow the robot down, but it gives it the distinct advantage of steerability. “It’s like paddling a boat,” said Yin.
Similar Reading: Harnessing the Mechanical Strength of the Mantis Shrimp
Speed and maneuverability make the robot an ideal candidate for monitoring maritime environments—it could gauge the severity of oil spills, collect data on ocean life, or spy on enemy navies. But, at the moment, the air powered robot remains tethered to a compressor. The solution is to get bigger. “If we scale up, we can put everything on board,” said Yin. “It can have wireless control and can go anywhere.” And going up in size likely means going up in speed as well.
Yin and his team are also working on making the robot quieter—better for observing the fishes and naval operations alike—and they may someday try to make the wings ripple like the manta ray’s, as well as experiment with other materials for wing and body.
This, of course, was a first flap, a proof of concept. “We haven’t optimized in terms of design,” said Yin. “And we need to collaborate with scientists in fluid dynamics. They can give us insight into how we should optimize wing shape, wing size, body size, and things like that.”
Michael Abrams is a technology writer based in Westfield, N.J.
Related Content